Σερβομηχανισμός συνεχούς περιστροφής. Servo Arduino SG90, MG995, MG996: διάγραμμα καλωδίωσης και έλεγχος Βουρτσισμένοι και χωρίς ψήκτρες κινητήρες
Αυτό το άρθρο εξετάζει τους σερβομηχανισμούς: τη συσκευή τους, τον σκοπό, συμβουλές για τη σύνδεση και τον έλεγχο, τους τύπους σερβομηχανισμών και τη σύγκρισή τους. Ας ξεκινήσουμε και ας ξεκινήσουμε με το τι είναι το servo.
Η έννοια του σερβομηχανισμού
Ο σερβοκινητήρας νοείται συχνότερα ως ένας μηχανισμός με ηλεκτρικό κινητήρα, από τον οποίο μπορεί να ζητηθεί να στραφεί σε μια δεδομένη γωνία και να κρατήσει αυτή τη θέση. Ωστόσο, αυτός δεν είναι ένας πλήρης ορισμός.
Για να το θέσω πληρέστερα, μια μονάδα σερβομηχανισμού είναι μια μονάδα με έλεγχο μέσω αρνητικής ανάδρασης, η οποία σας επιτρέπει να ελέγχετε με ακρίβεια τις παραμέτρους κίνησης. Σερβομηχανισμός είναι οποιοσδήποτε τύπος μηχανικής κίνησης που περιλαμβάνει έναν αισθητήρα (θέση, ταχύτητα, δύναμη κ.λπ.) και μια μονάδα ελέγχου μετάδοσης κίνησης που διατηρεί αυτόματα τις απαραίτητες παραμέτρους στον αισθητήρα και τη συσκευή σύμφωνα με μια δεδομένη εξωτερική τιμή.
Με άλλα λόγια:
Η μονάδα σερβομηχανισμού λαμβάνει την τιμή της παραμέτρου ελέγχου ως είσοδο. Για παράδειγμα, η γωνία περιστροφής.
Η μονάδα ελέγχου συγκρίνει αυτήν την τιμή με την τιμή στον αισθητήρα της.
Με βάση το αποτέλεσμα της σύγκρισης, ο ηλεκτροκινητήρας εκτελεί κάποια ενέργεια, όπως περιστροφή, επιτάχυνση ή επιβράδυνση, έτσι ώστε η τιμή από τον εσωτερικό αισθητήρα να πλησιάζει όσο το δυνατόν περισσότερο την τιμή της μεταβλητής εξωτερικού ελέγχου.
Οι πιο συνηθισμένοι είναι οι σερβομηχανισμοί που κρατούν μια δεδομένη γωνία και οι σερβομηχανισμοί που διατηρούν μια δεδομένη ταχύτητα περιστροφής.
Ένας τυπικός σερβομηχανισμός χόμπι φαίνεται παρακάτω.
Πώς είναι τακτοποιημένα τα σερβομηχανήματα;
Σερβο συσκευή
Οι μονάδες σερβομηχανισμού έχουν πολλά εξαρτήματα.

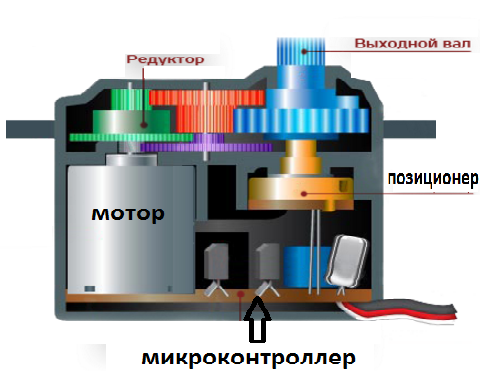
Κίνηση - ηλεκτροκινητήρας με κιβώτιο ταχυτήτων. Για να μετατρέψετε την ηλεκτρική ενέργεια σε μηχανική περιστροφή, χρειάζεστε ηλεκτρικός κινητήρας. Ωστόσο, συχνά η ταχύτητα περιστροφής του κινητήρα είναι πολύ υψηλή για πρακτική χρήση. Χρησιμοποιείται για να επιβραδύνει την ταχύτητα περιστέλλων: μηχανισμός γραναζιών που μεταδίδει και μετατρέπει τη ροπή.
Ενεργοποιώντας και απενεργοποιώντας τον ηλεκτροκινητήρα, μπορούμε να περιστρέψουμε τον άξονα εξόδου - το τελικό γρανάζι του σερβομηχανισμού, στον οποίο μπορούμε να συνδέσουμε κάτι που θέλουμε να ελέγξουμε. Ωστόσο, για να ελέγχεται η θέση από τη συσκευή, αισθητήρας ανάδρασης - κωδικοποιητής, το οποίο θα μετατρέψει τη γωνία του τιμονιού ξανά σε ηλεκτρικό σήμα. Συχνά χρησιμοποιείται ένα ποτενσιόμετρο για αυτό. Όταν περιστρέφεται το ρυθμιστικό του ποτενσιόμετρου, η αντίστασή του αλλάζει, ανάλογα με τη γωνία περιστροφής. Έτσι, μπορεί να χρησιμοποιηθεί για να ρυθμίσετε την τρέχουσα θέση του μηχανισμού.
Εκτός από τον ηλεκτροκινητήρα, το κιβώτιο ταχυτήτων και το ποτενσιόμετρο, ο σερβοκινητήρας διαθέτει ηλεκτρονικό γέμισμα, το οποίο είναι υπεύθυνο για τη λήψη μιας εξωτερικής παραμέτρου, την ανάγνωση τιμών από το ποτενσιόμετρο, τη σύγκριση τους και την ενεργοποίηση / απενεργοποίηση του κινητήρα. Είναι υπεύθυνη για τη διατήρηση αρνητικών σχολίων.
Υπάρχουν τρία καλώδια που πηγαίνουν στον σερβομηχανισμό. Δύο από αυτά είναι υπεύθυνα για την τροφοδοσία του κινητήρα, το τρίτο παρέχει ένα σήμα ελέγχου που χρησιμοποιείται για τη ρύθμιση της θέσης της συσκευής.
Τώρα ας δούμε πώς να ελέγχετε τον σερβομηχανισμό εξωτερικά.
Έλεγχος σερβομηχανισμού. Διεπαφή σήματος ελέγχου
Για να υποδείξετε την επιθυμητή θέση στον σερβομηχανισμό, πρέπει να σταλεί ένα σήμα ελέγχου κατά μήκος του καλωδίου που προορίζεται για αυτό. Σήμα ελέγχου - παλμοί σταθερής συχνότητας και μεταβλητού πλάτους.

Η θέση που πρέπει να πάρει ο σερβομηχανισμός εξαρτάται από το μήκος των παλμών. Όταν ένα σήμα εισέρχεται στο κύκλωμα ελέγχου, η γεννήτρια παλμών σε αυτό παράγει τον δικό της παλμό, η διάρκεια του οποίου προσδιορίζεται μέσω ενός ποτενσιόμετρου. Ένα άλλο μέρος του κυκλώματος συγκρίνει τη διάρκεια των δύο παλμών. Εάν η διάρκεια είναι διαφορετική, ο ηλεκτροκινητήρας είναι ενεργοποιημένος. Η φορά περιστροφής καθορίζεται από το ποιος από τους παλμούς είναι μικρότερος. Εάν τα μήκη των παλμών είναι ίσα, ο ηλεκτροκινητήρας σταματά.
Τις περισσότερες φορές στους σερβομηχανισμούς χόμπι, οι παλμοί παράγονται σε συχνότητα 50 Hz. Αυτό σημαίνει ότι ένας παλμός εκπέμπεται και λαμβάνεται μία φορά κάθε 20 ms. Συνήθως, μια διάρκεια παλμού 1520 µs σημαίνει ότι ο σερβομηχανισμός πρέπει να πάρει τη μεσαία θέση. Η αύξηση ή η μείωση του μήκους του παλμού θα προκαλέσει τη στροφή του σερβομηχανισμού δεξιόστροφα ή αριστερόστροφα αντίστοιχα. Σε αυτή την περίπτωση, υπάρχουν άνω και κάτω όρια διάρκειας παλμού. Στη βιβλιοθήκη Servo για το Arduino, τα προεπιλεγμένα μήκη παλμών είναι 544 µs για 0° και 2400 µs για 180°.
Λάβετε υπόψη ότι στη συγκεκριμένη συσκευή σας, οι εργοστασιακές ρυθμίσεις ενδέχεται να διαφέρουν από τις τυπικές. Ορισμένοι σερβομηχανισμοί χρησιμοποιούν πλάτος παλμού 760 µs. Σε αυτήν την περίπτωση, η μεσαία θέση αντιστοιχεί σε 760 µs, με τον ίδιο τρόπο όπως στους συμβατικούς σερβοκινητήρες, η μέση θέση αντιστοιχεί σε 1520 µs.
Αξίζει επίσης να σημειωθεί ότι πρόκειται απλώς για γενικά αποδεκτά μήκη. Ακόμη και μέσα στο ίδιο μοντέλο σερβομηχανισμού, μπορεί να υπάρχει κατασκευαστικό σφάλμα που προκαλεί το εύρος λειτουργίας των μηκών παλμών να είναι ελαφρώς διαφορετικό. Για ακριβή λειτουργία, κάθε συγκεκριμένος σερβομηχανισμός πρέπει να βαθμονομηθεί: μέσω πειραμάτων, είναι απαραίτητο να επιλέξετε το σωστό εύρος που είναι συγκεκριμένο για αυτό.
Αυτό που άλλο αξίζει να προσέξουμε είναι η σύγχυση στην ορολογία. Συχνά ο τρόπος ελέγχου των σερβομηχανισμών ονομάζεται PWM / PWM (Pulse Width Modulation) ή PPM (Pulse Position Modulation). Αυτό δεν συμβαίνει και η χρήση αυτών των μεθόδων μπορεί ακόμη και να προκαλέσει βλάβη στη μονάδα. Ο σωστός όρος είναι PDM (Pulse Duration Modulation). Σε αυτό, το μήκος των παλμών είναι εξαιρετικά σημαντικό και η συχνότητα εμφάνισής τους δεν είναι τόσο σημαντική. Τα 50 Hz είναι ο κανόνας, αλλά ο σερβομηχανισμός θα λειτουργεί σωστά και στα 40 και στα 60 Hz. Το μόνο πράγμα που πρέπει να έχετε κατά νου είναι ότι με έντονη μείωση της συχνότητας, μπορεί να λειτουργήσει σπασμωδικά και με μειωμένη ισχύ, και με έντονη αύξηση της συχνότητας (για παράδειγμα, 100 Hz), μπορεί να υπερθερμανθεί και να αποτύχει.
Προδιαγραφές Servo
Τώρα ας καταλάβουμε τι είναι τα servo και ποια χαρακτηριστικά έχουν.
Ροπή και ταχύτητα στροφής
Αρχικά, ας μιλήσουμε για δύο πολύ σημαντικά χαρακτηριστικά ενός σερβομηχανισμού: ροπήκαι περίπου ταχύτητα στροφής.
Η ροπή της δύναμης, ή η ροπή, είναι ένα διανυσματικό φυσικό μέγεθος ίσο με το γινόμενο του διανύσματος ακτίνας που αντλείται από τον άξονα περιστροφής μέχρι το σημείο εφαρμογής της δύναμης από το διάνυσμα αυτής της δύναμης. Χαρακτηρίζει την περιστροφική δράση της δύναμης σε ένα άκαμπτο σώμα.

Με απλά λόγια, αυτό το χαρακτηριστικό δείχνει πόσο βαρύ φορτίο μπορεί να κρατήσει ο σερβομηχανισμός σε ηρεμία σε ένα μοχλό δεδομένου μήκους. Εάν η ροπή του σερβομηχανισμού είναι 5 kg × cm, τότε αυτό σημαίνει ότι ο σερβομηχανισμός θα κρατά ένα μοχλό μήκους 1 cm στο βάρος σε οριζόντια θέση, στο ελεύθερο άκρο του οποίου κρέμονται 5 kg. Ή, ισοδύναμα, ένας μοχλός μήκους 5 cm, από τον οποίο κρεμιέται 1 κιλό.
Η ταχύτητα του σερβομηχανισμού μετριέται με το χρόνο που χρειάζεται ο σερβοβραχίονας για να περιστραφεί κατά 60°. Ένα χαρακτηριστικό 0,1s/60° σημαίνει ότι ο σερβομηχανισμός γυρίζει 60° σε 0,1 δευτερόλεπτα. Από αυτό είναι εύκολο να υπολογίσετε την ταχύτητα σε μια πιο οικεία τιμή, στροφές ανά λεπτό, αλλά συνέβη ότι κατά την περιγραφή των σερβομηχανισμών, μια τέτοια μονάδα χρησιμοποιείται συχνότερα.
Αξίζει να σημειωθεί ότι μερικές φορές πρέπει να βρείτε έναν συμβιβασμό μεταξύ αυτών των δύο χαρακτηριστικών, γιατί αν θέλουμε ένα αξιόπιστο, βαρέως τύπου σερβομηχανισμό, τότε πρέπει να είμαστε προετοιμασμένοι για αυτή την πανίσχυρη εγκατάσταση να στρίψει αργά. Και αν θέλουμε μια πολύ γρήγορη οδήγηση, τότε θα είναι σχετικά εύκολο να την αποσυμφορήσουμε. Όταν χρησιμοποιείτε τον ίδιο κινητήρα, η ισορροπία καθορίζεται από τη διαμόρφωση των γραναζιών στο κιβώτιο ταχυτήτων.
Φυσικά, μπορούμε πάντα να πάρουμε ένα εργοστάσιο που καταναλώνει περισσότερη ενέργεια, αρκεί τα χαρακτηριστικά του να ανταποκρίνονται στις ανάγκες μας.
Παράγοντας μορφής
Οι σερβομηχανισμοί ποικίλλουν σε μέγεθος. Και παρόλο που δεν υπάρχει επίσημη ταξινόμηση, οι κατασκευαστές έχουν τηρήσει από καιρό πολλά μεγέθη με μια γενικά αποδεκτή διάταξη συνδετήρων. Μπορούν να χωριστούν σε:
μικρό
πρότυπο
Έχουν τις εξής χαρακτηριστικές διαστάσεις:
Υπάρχουν επίσης οι λεγόμενοι σερβομηχανισμοί «ειδικού τύπου» με διαστάσεις που δεν εμπίπτουν σε αυτήν την ταξινόμηση, αλλά το ποσοστό τέτοιων σερβομηχανισμών είναι πολύ μικρό.
Εσωτερική διεπαφή
Οι μονάδες Servo είναι είτε αναλογικές είτε ψηφιακές. Ποιες είναι λοιπόν οι διαφορές, τα πλεονεκτήματα και τα μειονεκτήματά τους;
Εξωτερικά, δεν διαφέρουν: οι ηλεκτροκινητήρες, τα κιβώτια ταχυτήτων, τα ποτενσιόμετρα είναι τα ίδια, διαφέρουν μόνο στα ηλεκτρονικά εσωτερικού ελέγχου. Αντί για ειδικό αναλογικό σερβοτσιπ, το ψηφιακό αντίστοιχο φαίνεται στην πλακέτα με έναν μικροεπεξεργαστή που λαμβάνει παλμούς, τους αναλύει και ελέγχει τον κινητήρα. Έτσι, στη φυσική έκδοση, η διαφορά είναι μόνο στον τρόπο επεξεργασίας των παλμών και στον έλεγχο του κινητήρα.

Και οι δύο τύποι σερβομηχανισμού λαμβάνουν τους ίδιους παλμούς ελέγχου. Στη συνέχεια, ο αναλογικός σερβομηχανισμός αποφασίζει εάν θα αλλάξει θέση και στέλνει ένα σήμα στον κινητήρα εάν είναι απαραίτητο. Αυτό συμβαίνει συνήθως σε συχνότητα 50 Hz. Έτσι, παίρνουμε 20 ms - τον ελάχιστο χρόνο αντίδρασης. Αυτή τη στιγμή, οποιαδήποτε εξωτερική επιρροή μπορεί να αλλάξει τη θέση του σερβομηχανισμού. Αλλά αυτό δεν είναι το μόνο πρόβλημα. Σε κατάσταση ηρεμίας, δεν εφαρμόζεται τάση στον ηλεκτροκινητήρα· σε περίπτωση μικρής απόκλισης από την ισορροπία, παρέχεται ένα σύντομο σήμα χαμηλής ισχύος στον ηλεκτροκινητήρα. Όσο μεγαλύτερη είναι η απόκλιση, τόσο ισχυρότερο είναι το σήμα. Έτσι, με μικρές αποκλίσεις, ο σερβομηχανισμός δεν θα μπορεί να περιστρέψει γρήγορα τον κινητήρα ή να αναπτύξει μεγάλη ροπή. Οι «νεκρές ζώνες» σχηματίζονται σε χρόνο και απόσταση.
Αυτά τα προβλήματα μπορούν να λυθούν αυξάνοντας τη συχνότητα λήψης, την επεξεργασία σήματος και τον έλεγχο του κινητήρα. Οι ψηφιακοί σερβομηχανισμοί χρησιμοποιούν έναν ειδικό επεξεργαστή που λαμβάνει παλμούς ελέγχου, τους επεξεργάζεται και στέλνει σήματα στον κινητήρα σε συχνότητα 200 Hz ή μεγαλύτερη. Αποδεικνύεται ότι ο ψηφιακός σερβομηχανισμός είναι σε θέση να ανταποκρίνεται ταχύτερα σε εξωτερικές επιρροές, να αναπτύσσει την απαραίτητη ταχύτητα και ροπή γρηγορότερα, πράγμα που σημαίνει ότι είναι καλύτερο να διατηρείται μια δεδομένη θέση, κάτι που είναι καλό. Φυσικά, ταυτόχρονα καταναλώνει περισσότερο ρεύμα. Επίσης, οι ψηφιακοί σερβομηχανισμοί είναι πιο δύσκολο να κατασκευαστούν και επομένως είναι αισθητά πιο ακριβοί. Στην πραγματικότητα, αυτά τα δύο μειονεκτήματα είναι όλα τα μειονεκτήματα που έχουν οι ψηφιακοί σερβομηχανισμοί. Σε τεχνικούς όρους, νικούν άνευ όρων τους αναλογικούς σερβομηχανισμούς.
Υλικά γραναζιών
Τα γρανάζια για σερβομηχανισμούς διατίθενται σε ποικιλία υλικών: πλαστικό, άνθρακας, μέταλλο. Όλα χρησιμοποιούνται ευρέως, η επιλογή εξαρτάται από τη συγκεκριμένη εργασία και από τα χαρακτηριστικά που απαιτούνται στην εγκατάσταση.

Τα πλαστικά, συνήθως νάιλον, γρανάζια είναι πολύ ελαφριά, δεν υπόκεινται σε φθορά και είναι πιο συνηθισμένα σε σερβοκινητήρες. Δεν αντέχουν μεγάλα φορτία, αλλά αν τα φορτία αναμένεται να είναι μικρά, τότε τα νάιλον γρανάζια είναι η καλύτερη επιλογή.
Τα γρανάζια άνθρακα είναι πιο ανθεκτικά, πρακτικά δεν φθείρονται και είναι αρκετές φορές ισχυρότερα από τα νάιλον. Το κύριο μειονέκτημα είναι το υψηλό κόστος.
Τα μεταλλικά γρανάζια είναι τα πιο βαριά, αλλά αντέχουν τα μέγιστα φορτία. Φθείρονται αρκετά γρήγορα, επομένως πρέπει να αλλάζετε ταχύτητες σχεδόν κάθε σεζόν. Τα γρανάζια τιτανίου είναι τα αγαπημένα μεταξύ των μεταλλικών γραναζιών, τόσο ως προς τα τεχνικά χαρακτηριστικά όσο και ως προς την τιμή. Δυστυχώς, θα σας κοστίσουν αρκετά.
Βουρτσισμένοι και χωρίς ψήκτρες κινητήρες
Υπάρχουν τρεις τύποι σερβοκινητήρων: συμβατικός κινητήρας πυρήνα, κινητήρας χωρίς πυρήνα και κινητήρας χωρίς ψήκτρες.

Ένας συμβατικός κινητήρας πυρήνα (δεξιά) έχει έναν πυκνό σιδερένιο ρότορα με περιελίξεις σύρματος και μαγνήτες γύρω του. Ο ρότορας έχει πολλαπλά τμήματα, έτσι καθώς ο κινητήρας περιστρέφεται, ο ρότορας προκαλεί ελαφρά δόνηση του κινητήρα καθώς τα τμήματα περνούν τους μαγνήτες, με αποτέλεσμα ένα σερβομηχανισμό που δονείται και είναι λιγότερο ακριβής από έναν σερβοκινητήρα χωρίς πυρήνα. Ο κινητήρας του κοίλου ρότορα (αριστερά) έχει έναν ενιαίο μαγνητικό πυρήνα με έναν κύλινδρο ή σχήμα καμπάνας περιέλιξης γύρω από τον μαγνήτη. Ο σχεδιασμός χωρίς πυρήνα είναι ελαφρύτερος σε βάρος και δεν έχει τμήματα, με αποτέλεσμα ταχύτερη απόκριση και ομαλή λειτουργία χωρίς κραδασμούς. Αυτοί οι κινητήρες είναι πιο ακριβοί, αλλά παρέχουν υψηλότερο επίπεδο ελέγχου, ροπής και ταχύτητας από τους τυπικούς κινητήρες.

Οι σερβομηχανές με κινητήρα χωρίς ψήκτρες εμφανίστηκαν σχετικά πρόσφατα. Τα πλεονεκτήματα είναι τα ίδια με άλλους κινητήρες χωρίς ψήκτρες: δεν υπάρχουν βούρτσες, που σημαίνει ότι δεν δημιουργούν αντίσταση στην περιστροφή και δεν φθείρονται, η ταχύτητα και η ροπή είναι υψηλότερες με κατανάλωση ρεύματος ίση με τους κινητήρες συλλέκτη. Οι σερβομηχανές χωρίς ψήκτρες είναι οι πιο ακριβοί σερβομηχανισμοί, αλλά προσφέρουν καλύτερη απόδοση από τους σερβομηχανισμούς με άλλους τύπους κινητήρων.
Σύνδεση στο Arduino
Πολλοί σερβομηχανισμοί μπορούν να συνδεθούν απευθείας στο Arduino. Για να γίνει αυτό, προέρχονται από ένα καλώδιο τριών καλωδίων:
κόκκινο - φαγητό? συνδέεται στον ακροδέκτη 5V ή απευθείας στο τροφοδοτικό
καφέ ή μαύρο - γη
κίτρινο ή λευκό - σήμα. συνδέεται με την ψηφιακή έξοδο Arduino.
Για να συνδεθείτε στο Arduino, θα είναι βολικό να χρησιμοποιήσετε μια πλακέτα επέκτασης θυρών, όπως το Troyka Shield. Αν και με μερικά επιπλέον καλώδια είναι δυνατή η σύνδεση του σερβομηχανισμού μέσω του breadboard ή απευθείας στις ακίδες Arduino.
Είναι δυνατό να δημιουργήσετε μόνοι σας παλμούς ελέγχου, αλλά αυτή είναι μια τόσο κοινή εργασία που υπάρχει η τυπική βιβλιοθήκη Servo για να την απλοποιήσει.
Περιορισμός τροφίμων
Ένας τυπικός σερβομηχανισμός για χόμπι αντλεί πάνω από 100 mA κατά τη λειτουργία. Ταυτόχρονα, το Arduino είναι σε θέση να αποδώσει έως και 500 mA. Επομένως, εάν χρειάζεται να χρησιμοποιήσετε έναν ισχυρό σερβομηχανισμό σε ένα έργο, είναι λογικό να σκεφτείτε να τον απομονώσετε σε ένα κύκλωμα με πρόσθετη ισχύ.
Εξετάστε το παράδειγμα σύνδεσης σερβομηχανισμού 12 V: 
Περιορισμός στον αριθμό των συνδεδεμένων σερβομηχανισμών
Στις περισσότερες πλακέτες Arduino, η βιβλιοθήκη Servo υποστηρίζει έως και 12 σερβομηχανισμούς, ενώ στο Arduino Mega αυτός ο αριθμός αυξάνεται σε 48. Υπάρχει μια μικρή παρενέργεια από τη χρήση αυτής της βιβλιοθήκης: εάν δεν εργάζεστε με ένα Arduino Mega, είναι αδύνατο να χρησιμοποιήστε τη λειτουργία analogWrite () σε 9 και 10 ακίδες ανεξάρτητα από το εάν οι σερβομηχανισμοί είναι συνδεδεμένοι σε αυτές τις ακίδες ή όχι. Μπορούν να συνδεθούν έως και 12 servos στο Arduino Mega χωρίς να διακοπεί η λειτουργία PWM/PWM, εάν χρησιμοποιήσουμε περισσότερους σερβομηχανισμούς, δεν θα μπορούμε να χρησιμοποιήσουμε το analogWrite() στις ακίδες 11 και 12.
Λειτουργία βιβλιοθήκης Servo
Η βιβλιοθήκη Servo επιτρέπει τον έλεγχο λογισμικού των σερβομηχανισμών. Για να γίνει αυτό, δημιουργείται μια μεταβλητή τύπου Servo. Η διαχείριση πραγματοποιείται με τις ακόλουθες λειτουργίες:
attach() - Προσαρτά μια μεταβλητή σε ένα συγκεκριμένο pin. Υπάρχουν δύο πιθανές συντακτικές για αυτήν τη συνάρτηση: servo.attach(pin) και servo.attach(pin, min, max) . Σε αυτήν την περίπτωση, η ακίδα είναι ο αριθμός της ακίδας στην οποία είναι συνδεδεμένος ο σερβομηχανισμός, τα ελάχιστα και μέγιστα είναι τα μήκη παλμού σε μικροδευτερόλεπτα, τα οποία είναι υπεύθυνα για τις γωνίες περιστροφής 0° και 180°. Από προεπιλογή, έχουν οριστεί σε 544 µs και 2400 µs, αντίστοιχα.
write() - δίνει εντολή στον σερβομηχανισμό να αποδεχτεί κάποια τιμή παραμέτρου. Η σύνταξη είναι: servo.write(γωνία) όπου η γωνία είναι η γωνία που πρέπει να γυρίσει ο σερβομηχανισμός.
writeMicroseconds() - δίνει εντολή αποστολής παλμού συγκεκριμένου μήκους στον σερβομηχανισμό, είναι ανάλογο χαμηλού επιπέδου της προηγούμενης εντολής. Η σύνταξη είναι: servo.writeMicroseconds(uS) όπου uS είναι το μήκος του παλμού σε μικροδευτερόλεπτα.
read() - διαβάζει την τρέχουσα τιμή της γωνίας στην οποία βρίσκεται ο σερβομηχανισμός. Η σύνταξη είναι: η servo.read() επιστρέφει μια ακέραια τιμή μεταξύ 0 και 180.
attached() - Ελέγχει εάν μια μεταβλητή έχει προσαρτηθεί σε ένα συγκεκριμένο pin. Η σύνταξη είναι: η servo.attached() επιστρέφει boolean true εάν η μεταβλητή έχει συνδεθεί σε οποιοδήποτε pin, ή false διαφορετικά.
detach() - εκτελεί την αντίθετη ενέργεια της attach() , δηλαδή αποσπά τη μεταβλητή από την ακίδα στην οποία έχει αντιστοιχιστεί. Η σύνταξη είναι: servo.detach() .
Όλες οι μέθοδοι βιβλιοθήκης Servo2 είναι ίδιες με τις μεθόδους Servo.
Ένα παράδειγμα χρήσης της βιβλιοθήκης Servo
Αντί για συμπέρασμα
Οι μονάδες Servo είναι διαφορετικοί, άλλοι είναι καλύτεροι - άλλοι είναι φθηνότεροι, άλλοι είναι πιο αξιόπιστοι - άλλοι είναι πιο ακριβείς. Και πριν αγοράσετε ένα σερβομηχανισμό, θα πρέπει να έχετε κατά νου ότι μπορεί να μην έχει τα καλύτερα χαρακτηριστικά, αρκεί να είναι κατάλληλο για το έργο σας. Καλή επιτυχία στις προσπάθειές σας!
Σε αυτό το άρθρο, θα μιλήσουμε για τους σερβομηχανισμούς σε έργα Arduino. Είναι χάρη στους σερβοκινητήρες που τα συνηθισμένα ηλεκτρονικά έργα γίνονται ρομποτικά. Η σύνδεση ενός σερβομηχανισμού σε ένα έργο Arduino σάς επιτρέπει να ανταποκρίνεστε στα σήματα του αισθητήρα με κάποια ακριβή κίνηση, όπως το άνοιγμα μιας πόρτας ή η περιστροφή των αισθητήρων προς τη σωστή κατεύθυνση. Το άρθρο εξετάζει τα ζητήματα ελέγχου των σερβομηχανισμών, πιθανά σχήματα για τη σύνδεση ενός σερβομηχανισμού σε ένα arduino, καθώς και παραδείγματα σκίτσων.
Η μονάδα σερβομηχανισμού είναι ένα είδος μονάδας δίσκου που μπορεί να ελέγξει με ακρίβεια τις παραμέτρους κίνησης. Με άλλα λόγια, είναι ένας κινητήρας που μπορεί να στρίψει τον άξονά του σε μια συγκεκριμένη γωνία ή να διατηρήσει συνεχή περιστροφή σε μια ακριβή περίοδο.
Η λειτουργία του σερβομηχανισμού βασίζεται στη χρήση ανάδρασης (ένα κλειστό κύκλωμα στο οποίο το σήμα στην είσοδο και στην έξοδο δεν ταιριάζει). Οποιοσδήποτε τύπος μηχανικής κίνησης μπορεί να λειτουργήσει ως σερβομηχανισμός, ο οποίος περιλαμβάνει έναν αισθητήρα και μια μονάδα ελέγχου που διατηρεί αυτόματα όλες τις καθορισμένες παραμέτρους στον αισθητήρα. Η δομή του σερβομηχανισμού αποτελείται από έναν κινητήρα, έναν αισθητήρα θέσης και ένα σύστημα ελέγχου. Το κύριο καθήκον τέτοιων συσκευών είναι η εφαρμογή στον τομέα των σερβομηχανισμών. Επίσης, οι σερβομηχανισμοί χρησιμοποιούνται συχνά σε τομείς όπως η επεξεργασία υλικών, η παραγωγή εξοπλισμού μεταφοράς, η επεξεργασία ξύλου, η παραγωγή μεταλλικών φύλλων, η παραγωγή οικοδομικών υλικών και άλλοι.
Σε έργα ρομποτικής arduino, ένας σερβομηχανισμός χρησιμοποιείται συχνά για απλές μηχανικές ενέργειες:
- Περιστρέψτε το αποστασιόμετρο ή άλλους αισθητήρες σε μια συγκεκριμένη γωνία για να μετρήσετε την απόσταση στο στενό οπτικό πεδίο του ρομπότ.
- Κάντε ένα μικρό βήμα με το πόδι, την κίνηση του άκρου ή του κεφαλιού.
- Για τη δημιουργία ρομποτικών χειριστών.
- Για την εφαρμογή του μηχανισμού διεύθυνσης.
- Ανοίξτε ή κλείστε μια πόρτα, αποσβεστήρα ή άλλο αντικείμενο.
Φυσικά, το εύρος των σερβομηχανισμών σε πραγματικά έργα είναι πολύ ευρύτερο, αλλά τα παραδείγματα που δίνονται είναι τα πιο δημοφιλή κυκλώματα.
Σχέδιο και τύποι σερβομηχανισμών
Η αρχή λειτουργίας ενός σερβομηχανισμού βασίζεται στην ανάδραση από ένα ή περισσότερα σήματα συστήματος. Ο δείκτης εξόδου τροφοδοτείται στην είσοδο, όπου η τιμή του συγκρίνεται με την ενέργεια ρύθμισης και εκτελούνται οι απαραίτητες ενέργειες - για παράδειγμα, ο κινητήρας είναι απενεργοποιημένος. Η απλούστερη εφαρμογή είναι μια μεταβλητή αντίσταση, η οποία ελέγχεται από έναν άξονα - όταν αλλάζουν οι παράμετροι της αντίστασης, αλλάζουν οι παράμετροι του ρεύματος που τροφοδοτεί τον κινητήρα.
Σε πραγματικούς σερβομηχανισμούς, ο μηχανισμός ελέγχου είναι πολύ πιο περίπλοκος και χρησιμοποιεί ενσωματωμένα τσιπ ελεγκτών. Ανάλογα με τον τύπο του μηχανισμού ανάδρασης που χρησιμοποιείται, υπάρχουν αναλογικόΚαι ψηφιακόσερβομηχανήματα. Οι πρώτοι χρησιμοποιούν κάτι που μοιάζει με ποτενσιόμετρο, οι δεύτεροι χρησιμοποιούν ελεγκτές.
 Ολόκληρο το κύκλωμα ελέγχου σερβομηχανισμού βρίσκεται μέσα στη θήκη, τα σήματα ελέγχου και η ισχύς παρέχονται, κατά κανόνα, περνούν από τρία καλώδια: γείωση, τάση τροφοδοσίας και σήμα ελέγχου.
Ολόκληρο το κύκλωμα ελέγχου σερβομηχανισμού βρίσκεται μέσα στη θήκη, τα σήματα ελέγχου και η ισχύς παρέχονται, κατά κανόνα, περνούν από τρία καλώδια: γείωση, τάση τροφοδοσίας και σήμα ελέγχου.
Σέρβο συνεχούς περιστροφής 360, 180 και 270 μοιρών
Υπάρχουν δύο κύριοι τύποι σερβοκινητήρων - με συνεχή περιστροφή και με σταθερή γωνία (τις περισσότερες φορές, 180 ή 270 μοίρες). Η διαφορά μεταξύ ενός σερβομηχανισμού περιορισμένης περιστροφής έγκειται στα μηχανικά σχεδιαστικά στοιχεία που μπορούν να εμποδίσουν την κίνηση του άξονα έξω από τις γωνίες που καθορίζονται από τις παραμέτρους. Έχοντας φτάσει σε γωνία 180, ο άξονας θα επηρεάσει τον περιοριστή και θα δώσει εντολή να απενεργοποιηθεί ο κινητήρας. Οι σερβοκινητήρες συνεχούς περιστροφής δεν έχουν τέτοιους περιοριστές.
Υλικά Servo Gear
Στους περισσότερους σερβομηχανισμούς, ο σύνδεσμος μεταξύ του άξονα και των εξωτερικών στοιχείων είναι ένα γρανάζι, επομένως είναι πολύ σημαντικό από τι υλικό είναι κατασκευασμένος. Υπάρχουν δύο πιο διαθέσιμες επιλογές: μεταλλικά ή πλαστικά γρανάζια. Σε πιο ακριβά μοντέλα, μπορείτε να βρείτε στοιχεία από άνθρακα και ακόμη και τιτάνιο.


Οι πλαστικές παραλλαγές είναι φυσικά φθηνότερες, ευκολότερες στην κατασκευή και συχνά χρησιμοποιούνται σε φθηνά μοντέλα σερβομηχανισμού. Για προπονητικά έργα, όταν ο σερβομηχανισμός κάνει πολλές κινήσεις, αυτό δεν είναι πρόβλημα. Αλλά σε σοβαρά έργα, η χρήση πλαστικού είναι αδύνατη, λόγω της πολύ γρήγορης φθοράς τέτοιων γραναζιών υπό φορτίο.
 Τα μεταλλικά γρανάζια είναι πιο αξιόπιστα, αλλά αυτό, φυσικά, επηρεάζει τόσο την τιμή όσο και το βάρος του μοντέλου. Οι οικονομικοί κατασκευαστές μπορούν να κατασκευάσουν μερικά από τα εξαρτήματα πλαστικά και μερικά μεταλλικά, αυτό πρέπει επίσης να ληφθεί υπόψη. Και, φυσικά, ότι στα φθηνότερα μοντέλα, ακόμη και η παρουσία ενός μεταλλικού γραναζιού δεν αποτελεί εγγύηση ποιότητας.
Τα μεταλλικά γρανάζια είναι πιο αξιόπιστα, αλλά αυτό, φυσικά, επηρεάζει τόσο την τιμή όσο και το βάρος του μοντέλου. Οι οικονομικοί κατασκευαστές μπορούν να κατασκευάσουν μερικά από τα εξαρτήματα πλαστικά και μερικά μεταλλικά, αυτό πρέπει επίσης να ληφθεί υπόψη. Και, φυσικά, ότι στα φθηνότερα μοντέλα, ακόμη και η παρουσία ενός μεταλλικού γραναζιού δεν αποτελεί εγγύηση ποιότητας.
Τα γρανάζια από τιτάνιο ή άνθρακα είναι η καλύτερη επιλογή εάν έχετε έναν προϋπολογισμό. Ελαφρύς και αξιόπιστος, τέτοιοι σερβομηχανισμοί χρησιμοποιούνται ευρέως για τη δημιουργία μοντέλων αυτοκινήτων, drones και αεροσκαφών.
Πλεονεκτήματα των σερβοκινητήρων
Η ευρεία χρήση των servo drives οφείλεται στο γεγονός ότι έχουν σταθερή λειτουργία, υψηλή αντοχή σε παρεμβολές, μικρό μέγεθος και μεγάλο εύρος ελέγχου ταχύτητας. Σημαντικά χαρακτηριστικά των σερβομηχανισμών είναι η δυνατότητα αύξησης της ισχύος και παροχής πληροφοριών ανάδρασης. Και έπεται ότι στην προς τα εμπρός κατεύθυνση, το κύκλωμα είναι ένας πομπός ενέργειας και στην αντίστροφη κατεύθυνση, είναι ένας πομπός πληροφοριών που χρησιμοποιείται για τη βελτίωση της ακρίβειας ελέγχου.
Διαφορές μεταξύ σερβο και συμβατικού κινητήρα
Ενεργοποιώντας ή απενεργοποιώντας έναν συμβατικό ηλεκτροκινητήρα, μπορούμε να δημιουργήσουμε μια περιστροφική κίνηση και να κάνουμε τροχούς ή άλλα αντικείμενα που συνδέονται με τον άξονα να κινούνται. Αυτή η κίνηση θα είναι συνεχής, αλλά για να καταλάβουμε σε ποια γωνία έχει γυρίσει ο άξονας ή πόσες στροφές έχει κάνει, θα χρειαστεί να εγκαταστήσετε πρόσθετα εξωτερικά στοιχεία: κωδικοποιητές. Ο σερβομηχανισμός περιέχει ήδη όλα τα απαραίτητα για τη λήψη πληροφοριών σχετικά με τις τρέχουσες παραμέτρους περιστροφής και μπορεί να απενεργοποιηθεί όταν ο άξονας στρίβει στην επιθυμητή γωνία.
Διαφορές μεταξύ σερβοκινητήρα και βηματικού κινητήρα
 Μια σημαντική διαφορά μεταξύ ενός σερβοκινητήρα και ενός βηματικού κινητήρα είναι η ικανότητα εργασίας με υψηλές επιταχύνσεις και με μεταβλητό φορτίο. Οι σερβοκινητήρες έχουν επίσης υψηλότερη ισχύ. Οι βηματικοί κινητήρες δεν έχουν ανάδραση, επομένως μπορεί να παρατηρηθεί η επίδραση της απώλειας βήματος, η απώλεια βήματος αποκλείεται στους σερβοκινητήρες - όλες οι παραβιάσεις θα καταγραφούν και θα διορθωθούν. Με όλα αυτά τα σαφή πλεονεκτήματα, οι σερβοκινητήρες είναι πιο ακριβοί από τους βηματικούς κινητήρες, έχουν πιο περίπλοκη καλωδίωση και σύστημα ελέγχου και απαιτούν πιο εξειδικευμένη συντήρηση. Είναι σημαντικό να σημειωθεί ότι οι βηματικοί κινητήρες και οι σερβοκινητήρες δεν είναι άμεσοι ανταγωνιστές - καθεμία από αυτές τις συσκευές έχει το δικό της ειδικό πεδίο εφαρμογής.
Μια σημαντική διαφορά μεταξύ ενός σερβοκινητήρα και ενός βηματικού κινητήρα είναι η ικανότητα εργασίας με υψηλές επιταχύνσεις και με μεταβλητό φορτίο. Οι σερβοκινητήρες έχουν επίσης υψηλότερη ισχύ. Οι βηματικοί κινητήρες δεν έχουν ανάδραση, επομένως μπορεί να παρατηρηθεί η επίδραση της απώλειας βήματος, η απώλεια βήματος αποκλείεται στους σερβοκινητήρες - όλες οι παραβιάσεις θα καταγραφούν και θα διορθωθούν. Με όλα αυτά τα σαφή πλεονεκτήματα, οι σερβοκινητήρες είναι πιο ακριβοί από τους βηματικούς κινητήρες, έχουν πιο περίπλοκη καλωδίωση και σύστημα ελέγχου και απαιτούν πιο εξειδικευμένη συντήρηση. Είναι σημαντικό να σημειωθεί ότι οι βηματικοί κινητήρες και οι σερβοκινητήρες δεν είναι άμεσοι ανταγωνιστές - καθεμία από αυτές τις συσκευές έχει το δικό της ειδικό πεδίο εφαρμογής.
Πού να αγοράσετε δημοφιλείς σερβομηχανισμούς SG90, MG995, MG996
 Η πιο προσιτή επιλογή σερβο SG90 1,6KG Η πιο προσιτή επιλογή σερβο SG90 1,6KG
|
 Servo SG90 και MG90S για Arduino σε τιμή κάτω από 70 ρούβλια Servo SG90 και MG90S για Arduino σε τιμή κάτω από 70 ρούβλια
|
 Μια άλλη επιλογή σερβομηχανισμού SG90 Pro 9g από έναν αξιόπιστο προμηθευτή στην Ali Μια άλλη επιλογή σερβομηχανισμού SG90 Pro 9g από έναν αξιόπιστο προμηθευτή στην Ali
|
 Servo SG90 από αξιόπιστο προμηθευτή RobotDyn Servo SG90 από αξιόπιστο προμηθευτή RobotDyn
|
 Servo Tester Servo Tester
|
 Αρκετές επιλογές σερβο δοκιμαστή Αρκετές επιλογές σερβο δοκιμαστή
|
 Προστατευμένο σερβομηχανισμό με ροπή 15 κιλών Προστατευμένο σερβομηχανισμό με ροπή 15 κιλών
|
 Servo JX DC5821LV 21KG Πλήρως αδιάβροχο Core mental gear 1/8 1/10 RC car Scaler Buggy Crawler TRAXXAS RC4WD TRX-4 SCX10 D90 Servo JX DC5821LV 21KG Πλήρως αδιάβροχο Core mental gear 1/8 1/10 RC car Scaler Buggy Crawler TRAXXAS RC4WD TRX-4 SCX10 D90
|
 Servo MG996R MG996 Servo Metal Gear για Futaba JR Servo MG996R MG996 Servo Metal Gear για Futaba JR
|
 Servo 13KG 15KG Servos Digital MG995 MG996 MG996R Servo Metal Gear Servo 13KG 15KG Servos Digital MG995 MG996 MG996R Servo Metal Gear
|
 Ο καθοριστικός παράγοντας στον έλεγχο των σερβομηχανισμών είναι το σήμα ελέγχου, το οποίο είναι ένας παλμός σταθερής συχνότητας και μεταβλητού πλάτους. Το μήκος παλμού είναι μια από τις πιο σημαντικές παραμέτρους που καθορίζουν τη θέση του σερβομηχανισμού. Αυτό το μήκος μπορεί να ρυθμιστεί χειροκίνητα στο πρόγραμμα χρησιμοποιώντας τη μέθοδο επιλογής μέσω της γωνίας ή χρησιμοποιώντας τις εντολές της βιβλιοθήκης. Για κάθε μάρκα συσκευής, το μήκος μπορεί να είναι διαφορετικό.
Ο καθοριστικός παράγοντας στον έλεγχο των σερβομηχανισμών είναι το σήμα ελέγχου, το οποίο είναι ένας παλμός σταθερής συχνότητας και μεταβλητού πλάτους. Το μήκος παλμού είναι μια από τις πιο σημαντικές παραμέτρους που καθορίζουν τη θέση του σερβομηχανισμού. Αυτό το μήκος μπορεί να ρυθμιστεί χειροκίνητα στο πρόγραμμα χρησιμοποιώντας τη μέθοδο επιλογής μέσω της γωνίας ή χρησιμοποιώντας τις εντολές της βιβλιοθήκης. Για κάθε μάρκα συσκευής, το μήκος μπορεί να είναι διαφορετικό.
Όταν το σήμα εισέρχεται στο κύκλωμα ελέγχου, η γεννήτρια δίνει τον παλμό της, η διάρκεια του οποίου προσδιορίζεται χρησιμοποιώντας ένα ποτενσιόμετρο. Σε άλλο τμήμα του κυκλώματος συγκρίνεται η διάρκεια του εφαρμοζόμενου σήματος και του σήματος από τη γεννήτρια. Εάν αυτά τα σήματα είναι διαφορετικά σε διάρκεια, ενεργοποιείται ο ηλεκτροκινητήρας, η φορά περιστροφής του οποίου καθορίζεται από το ποιος από τους παλμούς είναι μικρότερος. Εάν τα μήκη των παλμών είναι ίσα, ο κινητήρας σταματά.
 Η τυπική συχνότητα με την οποία εφαρμόζονται οι παλμοί είναι 50 Hz, δηλαδή 1 παλμός ανά 20 χιλιοστά του δευτερολέπτου. Σε αυτές τις τιμές, η διάρκεια είναι 1520 μικροδευτερόλεπτα και ο σερβομηχανισμός βρίσκεται στη μεσαία θέση. Η αλλαγή του μήκους του παλμού οδηγεί στην περιστροφή του σερβομηχανισμού - με αύξηση της διάρκειας, η περιστροφή είναι δεξιόστροφα, με μείωση - αριστερόστροφα. Υπάρχουν όρια διάρκειας - στο Arduino στη βιβλιοθήκη Servo για 0 ° η τιμή παλμού έχει οριστεί στα 544 μs (κατώτερο όριο), για 180 ° - 2400 μs (ανώτατο όριο).
Η τυπική συχνότητα με την οποία εφαρμόζονται οι παλμοί είναι 50 Hz, δηλαδή 1 παλμός ανά 20 χιλιοστά του δευτερολέπτου. Σε αυτές τις τιμές, η διάρκεια είναι 1520 μικροδευτερόλεπτα και ο σερβομηχανισμός βρίσκεται στη μεσαία θέση. Η αλλαγή του μήκους του παλμού οδηγεί στην περιστροφή του σερβομηχανισμού - με αύξηση της διάρκειας, η περιστροφή είναι δεξιόστροφα, με μείωση - αριστερόστροφα. Υπάρχουν όρια διάρκειας - στο Arduino στη βιβλιοθήκη Servo για 0 ° η τιμή παλμού έχει οριστεί στα 544 μs (κατώτερο όριο), για 180 ° - 2400 μs (ανώτατο όριο).

(Χρησιμοποιημένη εικόνα από το amperka.ru)
Είναι σημαντικό να έχετε κατά νου ότι σε μια συγκεκριμένη συσκευή, οι ρυθμίσεις ενδέχεται να διαφέρουν ελαφρώς από τις γενικά αποδεκτές τιμές. Για ορισμένες συσκευές, η μέση θέση και το πλάτος παλμού μπορεί να είναι 760 µs. Όλες οι αποδεκτές τιμές ενδέχεται επίσης να διαφέρουν ελαφρώς λόγω του σφάλματος που μπορεί να επιτρέπεται κατά την κατασκευή της συσκευής.
Η μέθοδος ελέγχου μονάδας δίσκου συχνά ονομάζεται λανθασμένα PWM / PWM, αλλά αυτό δεν είναι απολύτως σωστό. Ο έλεγχος εξαρτάται άμεσα από το μήκος παλμού, η συχνότητα εμφάνισής τους δεν είναι τόσο σημαντική. Η σωστή λειτουργία θα παρέχεται τόσο στα 40 Hz όσο και στα 60 Hz, μόνο μια ισχυρή μείωση ή αύξηση της συχνότητας θα συμβάλει. Με απότομη πτώση, η μονάδα σερβομηχανισμού θα αρχίσει να λειτουργεί σπασμωδικά, εάν η συχνότητα αυξηθεί πάνω από 100 Hz, η συσκευή μπορεί να υπερθερμανθεί. Επομένως, είναι πιο σωστό να καλέσετε το PDM.
Σύμφωνα με την εσωτερική διεπαφή, διακρίνονται οι αναλογικοί και ψηφιακοί σερβομηχανισμοί. Δεν υπάρχουν εξωτερικές διαφορές - όλες οι διαφορές είναι μόνο στα εσωτερικά ηλεκτρονικά. Ένας αναλογικός σερβομηχανισμός περιέχει ένα ειδικό μικροκύκλωμα μέσα, ένας ψηφιακός περιέχει έναν μικροεπεξεργαστή που λαμβάνει και αναλύει παλμούς.

Με τη λήψη ενός σήματος, ο αναλογικός σερβομηχανισμός αποφασίζει εάν θα μετακινήσει ή όχι τη θέση και, εάν είναι απαραίτητο, στέλνει ένα σήμα στον κινητήρα σε συχνότητα 50 Hz. Κατά τη διάρκεια του χρόνου αντίδρασης (20 ms), ενδέχεται να εμφανιστούν εξωτερικές επιρροές που θα αλλάξουν τη θέση του σερβομηχανισμού και η συσκευή δεν θα έχει χρόνο να αντιδράσει. Ο ψηφιακός σερβομηχανισμός χρησιμοποιεί έναν επεξεργαστή που στέλνει και επεξεργάζεται σήματα σε υψηλότερη συχνότητα - από 200 Hz, ώστε να μπορεί να ανταποκρίνεται ταχύτερα σε εξωτερικές επιρροές, να αναπτύσσει γρήγορα την επιθυμητή ταχύτητα και ροπή. Επομένως, ο ψηφιακός σερβομηχανισμός θα κρατήσει καλύτερα τη θέση ρύθμισης. Ταυτόχρονα, ο ψηφιακός σερβομηχανισμός απαιτεί περισσότερη ηλεκτρική ενέργεια για να λειτουργήσει, γεγονός που αυξάνει το κόστος τους. Η πολυπλοκότητα της παραγωγής τους συμβάλλει επίσης πολύ στην τιμή. Το υψηλό κόστος είναι το μόνο μειονέκτημα των ψηφιακών σερβομηχανισμών, τεχνικά είναι πολύ καλύτεροι από τις αναλογικές συσκευές.
Σύνδεση σερβοκινητήρα σε arduino
Ο σερβομηχανισμός έχει τρεις επαφές, οι οποίες είναι χρωματισμένες σε διαφορετικά χρώματα. Το καφέ καλώδιο οδηγεί στη γείωση, το κόκκινο καλώδιο οδηγεί σε ισχύ +5 V, το πορτοκαλί ή κίτρινο καλώδιο είναι σήμα. Η συσκευή συνδέεται με το Arduino μέσω του breadboard όπως φαίνεται στην εικόνα. Το πορτοκαλί καλώδιο (σήμα) συνδέεται με την ψηφιακή ακίδα, μαύρο και κόκκινο - στη γείωση και την τροφοδοσία, αντίστοιχα. Για να ελέγξετε έναν σερβοκινητήρα, δεν απαιτείται η σύνδεση ειδικά με τους ακροδέκτες - έχουμε ήδη περιγράψει την αρχή του σερβοελέγχου νωρίτερα.

Δεν συνιστάται η σύνδεση ισχυρών σερβομηχανισμών απευθείας στην πλακέτα. δημιουργούν ένα ρεύμα που δεν είναι συμβατό με τη ζωή για το κύκλωμα ισχύος Arduino - θα είστε τυχεροί εάν η προστασία λειτουργεί. Τα πιο συνηθισμένα συμπτώματα υπερφόρτωσης και ακατάλληλης τροφοδοσίας του σερβομηχανισμού είναι το τράνταγμα του σερβομηχανισμού, ο δυσάρεστος ήχος και η επαναφορά της πλακέτας. Για τροφοδοσία, είναι προτιμότερο να χρησιμοποιείτε εξωτερικές πηγές, φροντίστε να συνδυάσετε τη γείωση των δύο κυκλωμάτων.
Σκίτσο ελέγχου σερβομηχανισμού Arduino
Ο απευθείας έλεγχος ενός σερβομηχανισμού αλλάζοντας τη διάρκεια του παλμού στο σκίτσο δεν είναι μια ασήμαντη εργασία, αλλά ευτυχώς έχουμε μια εξαιρετική βιβλιοθήκη Servo ενσωματωμένη στο περιβάλλον ανάπτυξης του Arduino. Θα εξετάσουμε όλες τις αποχρώσεις του προγραμματισμού και της εργασίας με σερβομηχανισμούς σε ξεχωριστό άρθρο. Εδώ δίνουμε το απλούστερο παράδειγμα χρήσης Servo.
Ο αλγόριθμος της εργασίας είναι απλός:
- Αρχικά συμπεριλαμβάνουμε το Servo.h
- Δημιουργήστε ένα αντικείμενο της κλάσης Servo
- Στο μπλοκ εγκατάστασης, καθορίστε σε ποιο pin είναι συνδεδεμένος ο σερβομηχανισμός
- Χρησιμοποιούμε τις μεθόδους του αντικειμένου με τον συνηθισμένο τρόπο C++. Η πιο δημοφιλής είναι η μέθοδος εγγραφής, στην οποία τροφοδοτούμε μια ακέραια τιμή σε μοίρες (για ένα σερβο 360, αυτές οι τιμές θα ερμηνεύονται διαφορετικά).
Ένα παράδειγμα απλού σκίτσου για εργασία με σερβομηχανισμό
Ένα παράδειγμα έργου στο οποίο ρυθμίζουμε αμέσως τον σερβοκινητήρα σε μηδενική γωνία και μετά τον περιστρέφουμε κατά 90 μοίρες.
#περιλαμβάνω
Σκίτσο για δύο σερβομηχανισμούς
Και σε αυτό το παράδειγμα, εργαζόμαστε με δύο σερβομηχανισμούς ταυτόχρονα:
#περιλαμβάνω
Έλεγχος σερβομηχανισμού με ποτενσιόμετρο
Σε αυτό το παράδειγμα, περιστρέφουμε τον σερβομηχανισμό ανάλογα με την τιμή που λαμβάνεται από το ποτενσιόμετρο. Διαβάζουμε την τιμή και τη μετατρέπουμε σε γωνία χρησιμοποιώντας τη συνάρτηση χάρτη:
//Θραύσμα του τυπικού παραδείγματος χρήσης της βιβλιοθήκης Servo void loop() ( val = analogRead(A0); // Διαβάστε την τιμή από την ακίδα στην οποία είναι συνδεδεμένο το ποτενσιόμετρο val = map(val, 0, 1023, 0, 180); // Μετατρέψτε τον αριθμό στην περιοχή από 0 έως 1023 στη νέα περιοχή - 0 έως 180. servo.write(val); delay(15); )

Χαρακτηριστικά και σύνδεση του SG-90
Αν ψάχνετε να αγοράσετε τον φθηνότερο και απλούστερο σερβομηχανισμό, τότε το SG 90 είναι η καλύτερη επιλογή. Αυτός ο σερβομηχανισμός χρησιμοποιείται συχνότερα για τον έλεγχο μικρών, ελαφριών μηχανών με γωνία περιστροφής από 0° έως 180°.
Προδιαγραφές SG90:
- Ταχύτητα επεξεργασίας εντολών 0,12 δευτ./60 μοίρες.
- Τροφοδοτικό 4,8V;
- Θερμοκρασίες λειτουργίας από -30C έως 60C.
- Διαστάσεις 3,2 x 1,2 x 3 cm;
- Βάρος 9 γρ.
Περιγραφή του SG90
Τα χρώματα των καλωδίων είναι στάνταρ. Ο σερβομηχανισμός είναι φθηνός και δεν παρέχει ακριβείς ρυθμίσεις για τις θέσεις έναρξης και τέλους. Προκειμένου να αποφευχθούν περιττές υπερφορτώσεις και χαρακτηριστικό τρίξιμο στη θέση 0 και 180 μοιρών, είναι καλύτερο να ρυθμίσετε τα ακραία σημεία στις 10° και 170°. Κατά τη λειτουργία της συσκευής, είναι σημαντικό να παρακολουθείτε την τάση τροφοδοσίας. Με μια ισχυρή υπερεκτίμηση αυτού του δείκτη, τα μηχανικά στοιχεία των μηχανισμών γραναζιών μπορεί να καταστραφούν.
MG995 και MG996 tower pro servo
Ο σερβομηχανισμός MG995 είναι το δεύτερο πιο δημοφιλές μοντέλο σερβομηχανισμού που συνδέεται συχνότερα με έργα Arduino. Πρόκειται για σχετικά φθηνούς σερβομηχανισμούς με πολύ καλύτερη απόδοση από το SG90.
Προδιαγραφές MG995
Ο άξονας εξόδου στο MG995 περιστρέφεται 120 μοίρες (60 σε κάθε κατεύθυνση), αν και πολλοί πωλητές υποδεικνύουν 180 μοίρες. Η συσκευή είναι κατασκευασμένη σε πλαστική θήκη.
- Βάρος 55 g;
- Ροπή 8,5 kg x cm;
- Ταχύτητα 0,2s/60 μοίρες (στα 4,8V);
- Ισχύς λειτουργίας 4,8 - 7,2V;
- Θερμοκρασίες λειτουργίας - από 0C έως -55C.
Περιγραφή του MG995
Η σύνδεση με το arduino γίνεται επίσης μέσω τριών καλωδίων. Κατ 'αρχήν, για ερασιτεχνικά έργα, επιτρέπεται η απευθείας σύνδεση του MG995 στο Arduino, αλλά το ρεύμα του κινητήρα θα δημιουργεί πάντα ένα επικίνδυνο φορτίο για τις εισόδους της πλακέτας, επομένως συνιστάται να τροφοδοτείτε τους σερβομηχανισμούς ξεχωριστά, μην ξεχνάτε να συνδέσετε τη γείωση και των δύο κυκλωμάτων ισχύος. Μια άλλη επιλογή που διευκολύνει τη ζωή είναι η χρήση έτοιμων σερβοελεγκτών και ασπίδων, τα οποία θα εξετάσουμε σε ξεχωριστό άρθρο.
Το MG996R είναι παρόμοιο με το MG995 όσον αφορά τα χαρακτηριστικά, μόνο που βγαίνει σε μεταλλική θήκη.
Μετατροπή ενός σερβομηχανισμού σε σερβομηχανισμό συνεχούς περιστροφής
Όπως περιγράφηκε παραπάνω, ο σερβομηχανισμός ελέγχεται από παλμούς μεταβλητού πλάτους που ορίζουν τη γωνία περιστροφής. Η τρέχουσα θέση διαβάζεται από το ποτενσιόμετρο. Εάν ο άξονας και το ποτενσιόμετρο αποσυνδεθούν, ο σερβοκινητήρας θα λάβει τη θέση του ολισθητήρα του ποτενσιόμετρου όπως στο μεσαίο σημείο. Όλες αυτές οι ενέργειες θα οδηγήσουν στο γεγονός ότι η ανατροφοδότηση θα αφαιρεθεί. Αυτό σας επιτρέπει να ελέγχετε την ταχύτητα και την κατεύθυνση περιστροφής στο καλώδιο σήματος και να δημιουργείτε έναν σερβομηχανισμό συνεχούς περιστροφής. Είναι σημαντικό να σημειωθεί ότι ένας σερβομηχανισμός σταθερής περιστροφής δεν μπορεί να περιστραφεί σε μια συγκεκριμένη γωνία και να κάνει έναν αυστηρά καθορισμένο αριθμό στροφών.
Για να εκτελέσετε τα παραπάνω βήματα, θα πρέπει να αποσυναρμολογήσετε τη συσκευή και να κάνετε αλλαγές στο σχέδιο.
Στο Arduino IDE, πρέπει να δημιουργήσετε ένα μικρό σκίτσο που θα βάλει το rocker στη μεσαία θέση.
#περιλαμβάνω
Μετά από αυτό, η συσκευή πρέπει να συνδεθεί στο Arduino. Όταν συνδεθεί, ο σερβομηχανισμός θα αρχίσει να περιστρέφεται. Είναι απαραίτητο να επιτευχθεί η πλήρης διακοπή του ρυθμίζοντας την αντίσταση. Αφού σταματήσει η περιστροφή, πρέπει να βρείτε τον άξονα, να τραβήξετε το εύκαμπτο στοιχείο έξω από αυτό και να το εγκαταστήσετε ξανά.
Αυτή η μέθοδος έχει πολλά μειονεκτήματα - η ρύθμιση της αντίστασης σε πλήρη διακοπή είναι ασταθής, με το παραμικρό σοκ / θέρμανση / ψύξη, το ρυθμισμένο σημείο μηδέν μπορεί να πάει στραβά. Επομένως, είναι καλύτερο να χρησιμοποιήσετε τη μέθοδο αντικατάστασης του ποτενσιόμετρου με ένα τρίμερ. Για να το κάνετε αυτό, τραβήξτε έξω το ποτενσιόμετρο και αντικαταστήστε το με ένα τρίμερ με την ίδια αντίσταση. Το σημείο μηδέν πρέπει να ρυθμιστεί με ένα σκίτσο βαθμονόμησης.
Οποιαδήποτε μέθοδος μετατροπής ενός σερβομηχανισμού σε σερβομηχανισμό συνεχούς περιστροφής έχει τα μειονεκτήματά της. Πρώτον, είναι δύσκολο να ρυθμίσετε το σημείο μηδέν, οποιαδήποτε κίνηση μπορεί να το φέρει κάτω. Δεύτερον, το εύρος ελέγχου είναι μικρό - με μια μικρή αλλαγή στο πλάτος του παλμού, η ταχύτητα μπορεί να αλλάξει σημαντικά. Μπορείτε να επεκτείνετε το εύρος μέσω προγραμματισμού στο Arduino.
συμπέρασμα
Οι μονάδες Servo διαδραματίζουν πολύ σημαντικό ρόλο σε πολλά έργα Arduino, από τη ρομποτική έως τα έξυπνα οικιακά συστήματα. Όλα όσα συνδέονται με την κίνηση παραδοσιακά απαιτούν ειδικές γνώσεις και η δημιουργία μιας ολοκληρωμένης και σωστά λειτουργικής μονάδας δεν είναι εύκολη υπόθεση. Αλλά με τους σερβοκινητήρες, μπορείτε να απλοποιήσετε την εργασία σε πολλές περιπτώσεις, έτσι ο σερβομηχανισμός χρησιμοποιείται συνεχώς ακόμη και σε έργα αρχικού επιπέδου.
Σε αυτό το άρθρο, προσπαθήσαμε να καλύψουμε διάφορες πτυχές της χρήσης σερβομηχανισμών σε έργα arduino: από τη σύνδεση έως τη σύνταξη σκίτσων. Επιλέγοντας το απλούστερο μοντέλο σερβομηχανισμού (για παράδειγμα, sg 90), μπορείτε εύκολα να επαναλάβετε τα παραδείγματα που δίνονται και να δημιουργήσετε τα πρώτα σας έργα στα οποία κάτι κινείται και αλλάζει. Ελπίζουμε ότι αυτό το άρθρο θα σας βοηθήσει με αυτό.
Το απλούστερο από τα ρομπότ είναι 2-τροχο ή 4-τροχο. Ένα τέτοιο ρομπότ μπορεί να βασίζεται σε ένα σασί από ένα τηλεκατευθυνόμενο αυτοκίνητο, αλλά μπορεί να μην το έχουν όλοι στη διάθεσή τους ή μπορεί να είναι κρίμα να το σκαλίσουν. Μπορείτε επίσης να φτιάξετε το σασί μόνοι σας, αλλά το να βάλετε τους τροχούς απευθείας στον κινητήρα δεν είναι πολύ καλή λύση, ο κινητήρας πρέπει να φορτιστεί για να επιβραδύνει, για αυτό χρειάζεστε κιβώτιο ταχυτήτων. Η απόκτηση ενός έτοιμου πλαισίου ή ενός κιβωτίου ταχυτήτων ή ενός κινητήρα με κιβώτιο ταχυτήτων αποδείχθηκε ότι δεν ήταν τόσο εύκολη υπόθεση, σε αντίθεση με τους σερβομηχανισμούς. Σχεδόν κάθε σερβομηχανισμός μπορεί εύκολα να μετατραπεί σε κινητήρα με κιβώτιο ταχυτήτων.
Οι τροχοί μπορούν να κολληθούν απευθείας στην κουνιστή καρέκλα ενός τέτοιου κινητήρα και το σερβο σώμα είναι βολικό για τοποθέτηση.
ΠΡΟΣΟΧΗ! Ο σχεδιασμός άλλων σερβομηχανισμών ενδέχεται να διαφέρει και, επομένως, αυτό το εγχειρίδιο θα είναι μόνο μέρος του.
Ως βάση λήφθηκε ο απλούστερος και φθηνότερος σερβομηχανισμός:

Αρχικά, ας το αποσυναρμολογήσουμε.

Αρχικά, αφαιρούμε τα περιττά ηλεκτρονικά, δαγκώνουμε τον οδηγό, θα ελέγξουμε απευθείας τον κινητήρα. Στη συνέχεια, ας αρχίσουμε να τροποποιούμε τη μηχανική, αφαιρούμε την πρώτη ταχύτητα με έναν εξωτερικό άξονα και αφαιρούμε τον περιοριστή διαδρομής από αυτό.



Βγάζουμε την αντίσταση και δαγκώνουμε τον περιοριστή που βρίσκεται στο σώμα του.

Συλλέγουμε όλους τους μηχανικούς πίσω και ελέγχουμε αν όλα κινούνται με επιτυχία.
Το επόμενο βήμα είναι να κολλήσετε το καλώδιο στον κινητήρα.

Συναρμολογούμε τον πρώην σερβομηχανισμό σε νέο κινητήρα με κιβώτιο ταχυτήτων.
Όλα είναι έτοιμα, αν δεν έχετε κάνει λάθη, μπορείτε να απολαύσετε τη δουλειά.
Για να αποσυναρμολογήσουμε το σερβο μας χρειαζόμαστε ένα κατσαβίδι. Επειδή Αποσυναρμολογώ ένα πολύ μικρό σερβομηχανισμό, τότε χρειάζομαι ένα κατάλληλο κατσαβίδι. Προσωπικά χρησιμοποιώ κατσαβίδια από κάποιο φτηνό κινέζικο κιτ. Το αγόρασα σε ένα περίπτερο στην υπόγεια διάβαση για περίπου 5 $, επομένως δεν είναι πολύ ακριβό.
Για να ανοίξετε τον σερβομηχανισμό, πρέπει να ξεβιδώσετε μόνο τέσσερις βίδες. Βρίσκονται στο κάτω κάλυμμα. Ξεβιδώνω:

Αφού αφαιρέσετε το κάλυμμα, μπορείτε να δείτε τη μονάδα ελέγχου. Δεν θα μπω σε λεπτομέρειες, θα το αφαιρέσω από εδώ πάντως. Μπορείτε επίσης να δείτε τον κινητήρα στον οποίο οδηγούν δύο καλώδια.

Υπάρχει επίσης ένα κάλυμμα από πάνω, αφαιρώντας το οποίο μπορείτε να δείτε τα γρανάζια του κιβωτίου ταχυτήτων. Αξίζει να σημειωθεί ότι δύο από αυτά είναι στερεωμένα στο ποτενσιόμετρο - αυτό είναι πολύ σημαντικό, καθώς για να συνεχίσει το κιβώτιο ταχυτήτων να εκτελεί τη λειτουργία του, θα πρέπει πραγματικά να σπάσουμε το ποτενσιόμετρο - θα το χρησιμοποιήσουμε απλώς ως άξονα για τα γρανάζια.

Στην πραγματικότητα, είναι απαραίτητο να αφαιρέσετε όλα τα γρανάζια από τον σερβομηχανισμό και να τα αφήσετε στην άκρη για λίγο. Βγάζουμε το ποτενσιόμετρο (παρεμπιπτόντως, είναι και μεταβλητή αντίσταση) από τη θήκη σπρώχνοντάς το απαλά από την κάτω πλευρά του σερβομηχανισμού με ένα κατσαβίδι.

Αυτή είναι η στιγμή του σημείου χωρίς επιστροφή. Φυσικά, θα είναι πάντα δυνατό να συγκολληθούν τα πάντα, αλλά αυτό είναι ήδη πιο δύσκολο. Έτσι - δαγκώστε το ποτενσιόμετρο.

Στη συνέχεια, χρησιμοποιώντας την ίδια μέθοδο, διαχωρίζουμε τον πίνακα ελέγχου με καλώδια τροφοδοσίας και σήματος.

Στη συνέχεια δαγκώνουμε τα καλώδια από τον κινητήρα. Εδώ, να είστε προσεκτικοί και μην δαγκώνετε τις επαφές από τον ίδιο τον κινητήρα - εάν δεν είστε σίγουροι, είναι καλύτερο να αφήσετε το καλώδιο με ένα περιθώριο. Στη συνέχεια μπορεί να συγκολληθεί. Δάγκωσα το καλώδιο μέχρι την ίδια επαφή.


Ας κάνουμε μια απογραφή.

Όλα δείχνουν να είναι στη θέση τους. Τώρα παίρνουμε το ποτενσιόμετρο μας στο χέρι.

Το γεγονός είναι ότι τώρα περιστρέφεται επίσης μόνο υπό μια ορισμένη γωνία. Και επειδή είναι άξονας και πάνω του είναι στερεωμένο το μεγαλύτερο γρανάζι, πάνω στο οποίο θα τοποθετήσουμε ουσιαστικά τον τροχό αργότερα, πρέπει να φροντίζουμε να περιστρέφεται συνεχώς. Βγάζουμε δύο μεταλλικές πλάκες που το εμποδίζουν. Παίρνουμε:

Ελπίζω οι φωτογραφίες να κάνουν ξεκάθαρο τι έκανα. Το έσκισα με μικρή πένσα, αφού δεν υπήρχε κάτι πιο κατάλληλο στο χέρι.
Τώρα πρέπει να κόψετε τον περιοριστή στο ίδιο το γρανάζι. Μοιάζει με προεξοχή από το κάτω μέρος του γραναζιού. Είναι εύκολο να το βρεις, μοιάζει με αυτό.

Rezhem.

Και στην πραγματικότητα μετά από αυτό μπορείτε να ξεκινήσετε τη συναρμολόγηση του κιβωτίου ταχυτήτων πίσω στο περίβλημα. Εισάγουμε πίσω τον άξονα που φτιάξαμε νωρίτερα από το ποτενσιόμετρο.

Στη συνέχεια, ένα προς ένα γρανάζια ξεκινώντας από το μικρότερο. Να είστε προσεκτικοί κατά την εισαγωγή της τελευταίας ταχύτητας - είναι ειδικά προσαρμοσμένη στον άξονα του πρώην ποτενσιόμετρου, καθώς η άκρη του άξονα είναι φτιαγμένη σε σχήμα γράμματος ρε. Είναι απαραίτητο αυτή η προεξοχή να μπει στην εσοχή του γραναζιού. Αποδεικνύεται κάτι παρόμοιο με την παρακάτω εικόνα.

Τοποθετούμε το επάνω κάλυμμα στο κιβώτιο ταχυτήτων για να μην καταρρεύσει κατά τη διάρκεια της περαιτέρω εργασίας.

Λοιπόν, δεν έχουν μείνει πολλοί. Παίρνουμε ένα σύρμα με ένα βύσμα που προηγουμένως το δαγκώσαμε από την πλακέτα και χωρίζουμε την καλωδίωση σε αυτό. Δεν πρέπει να αποχωρίζεστε από μεγάλη απόσταση, μάλιστα ένα εκατοστό είναι αρκετό.

Καθαρίζουμε δύο από αυτά (μάλιστα οποιαδήποτε, αλλά χρησιμοποίησα κόκκινο και πράσινο). Αρκεί να κόψετε περίπου 3 mm μόνωσης. Για τους σκοπούς μας - περισσότερο από.

Απλώς λυγίζουμε το υπόλοιπο ξεγυμνωμένο σύρμα για να μην μας παρεμβαίνει.

Ας περάσουμε στο hot. Ήρθε η ώρα να ζεστάνετε το κολλητήρι. Κατά τη διάρκεια του χρόνου που θερμαίνεται το κολλητήρι, έκανα τον σερβομηχανισμό πιο άνετο στη λαβή.


Πρώτα απ 'όλα, θα χρειαστεί να αφαιρέσουμε τα υπολείμματα της παλιάς συγκόλλησης που παρέμειναν στις επαφές του κινητήρα. Αυτό το κάνω με μια αντλία αποκόλλησης, προθερμαίνοντας την επαφή με ένα συγκολλητικό σίδερο σε τέτοια κατάσταση ώστε η συγκόλληση να λιώσει. Το κύριο πράγμα εδώ δεν είναι να το παρακάνετε - το πίσω κάλυμμα του κινητήρα είναι ακόμα πλαστικό και δεν του αρέσει να ζεσταίνεται για μεγάλο χρονικό διάστημα. Η διαδικασία μοιάζει κάπως έτσι:


Καταλαβαίνω ότι είναι δυνατό και όχι πολύ αισθητό αυτό που έκανα, αλλά πρακτικά δεν είχε μείνει κόλληση στις επαφές, αυτό που προσπαθούσα να πετύχω.

Υπάρχουν υπέροχα άρθρα για τη συγκόλληση στο DI HALT "α. Είναι γενικά μια ιδιοφυΐα, μου φαίνεται. Link στο blog του, υπάρχουν πολλά πράγματα εκτός από τη συγκόλληση, στην πραγματικότητα, απλά ψάξτε.
Εν ολίγοις, για να κάνεις καλή συγκόλληση, πρέπει πάντα να ξεφορτώνεσαι την παλιά κόλληση στην αρχή.
Απομένει να συγκολληθούν δύο καλώδια. Ποιος είναι εξοικειωμένος με τη συγκόλληση - αντιμετωπίσει σε 5 δευτερόλεπτα. Ο οποίος, όπως εγώ, για δεύτερη φορά στη ζωή μου, πήρε κανονικά ένα κολλητήρι, θα χρειαστεί λίγο περισσότερο χρόνο, αλλά και πάλι - είναι πολύ απλό, όλοι μπορούν να το κάνουν αυτό.
Κατά τη διάρκεια της συγκόλλησης χρησιμοποιώ ένα flux, το οποίο ομολογουμένως κάνει τη δουλειά πιο εύκολη κατά καιρούς και η ποιότητα της συγκόλλησης με αυτό είναι πολύ πιο εύκολο να διασφαλιστεί. Προσωπικά, κατόπιν συμβουλής μου, πάλι, ο DI HALT "και στο blog του κατάφερα ήδη να ερωτευτώ το LTI-120. Το έχω σε ένα τόσο μοδάτο βάζο αμέσως με ένα πινέλο.

Σφίγγουμε τέσσερις βίδες.

Αυτό είναι όλο, τελείωσε η αλλοίωση του σερβομηχανισμού. Έχοντας επανατοποθετήσει τον σερβομηχανισμό πιο άνετα και πιο σταθερά στη λαβή, μπορείτε να ξεκινήσετε τις δοκιμές.

Αυτή τη φορά δεν θα είμαι πολύπλοκος με τον ελεγκτή, αλλά απλώς θα εφαρμόσω τάση από το τροφοδοτικό στα 5 V στα πράσινα και κόκκινα καλώδια. Προσοχή, στο βίντεο φαίνεται ένας αρκετά δυνατός ήχος από τη λειτουργία του δίσκου.
Όπως μπορείτε να δείτε, τώρα τίποτα δεν εμποδίζει τον σερβομηχανισμό μας να περιστρέφεται χωρίς διακοπή. Ο ήχος που εκπέμπεται από τη μονάδα δίσκου δεν είναι πραγματικά ήσυχος, αλλά καταρχήν είναι ανεκτός. Αυτό μάλλον είναι όλο για σήμερα.
Οι μονάδες σερβομηχανισμού έχουν συνήθως περιορισμένη γωνία περιστροφής 180 μοιρών. Σε αυτή την περίπτωση, σκεφτείτε ένα "τροποποιημένο" σερβομηχανισμό με απεριόριστη γωνία περιστροφής του άξονα. 
TTX από τη σελίδα του πωλητή
Μέγεθος: 40*20*37,5+5mm κινητήριος άξονας
βάρος: 38 γρ
Μήκος σύρματος: 320 mm
Ταχύτητα: 0,19 δευτ./60 μοίρες (4,8 V)
0,22 δευτ./60 μοίρες (6V)
οι ταχύτητες πιθανότατα είναι μπερδεμένες, στα 6 βολτ το σερβο πρέπει να είναι πιο γρήγορο
ροπή: 5 κιλά. εκ. στα (4,8 V)
5,5 kg.cm.at (6V)
τάση: 4,8V-6V
Πρότυπο σετ παράδοσης 
4 κουνιστές καρέκλες διαφορετικών σχημάτων
4 δακτύλιοι, 4 λαστιχένιοι αποσβεστήρες και 4 βίδες για την τοποθέτηση του σερβομηχανισμού
και μια άλλη μικρή βίδα για τη στερέωση της κουνιστή καρέκλας στον άξονα έφυγε από τη φωτογραφία :)
Η εμφάνιση εμπνέει εμπιστοσύνη, τίποτα στην αφή, μικρά κοπάδια χύτευσης μόνο στην περιοχή των αυτιών τοποθέτησης, ένα αυτοκόλλητο είναι ελαφρώς στραβό (ναι, ταυτολογία!). Το καλώδιο είναι μαλακό, ο σύνδεσμος κάθεται καλά στις ακίδες. 
Λοιπόν, τώρα το άνοιγμα:
Ποιος δεν ήξερε πώς λειτουργεί: στην περίπτωση υπάρχει ένας κινητήρας, ένας πίνακας ελέγχου και μια μεταβλητή αντίσταση, από τη θέση της οποίας ο σερβομηχανισμός καθορίζει τη γωνία του άξονα.
Το κιβώτιο ταχυτήτων σε αυτό το σερβομηχανισμό είναι πλαστικό, ο πόρος είναι μικρότερος από αυτόν ενός μεταλλικού και δεν του αρέσουν τα μεγάλα φορτία. Ο δακτύλιος για τον κεντρικό άξονα είναι χαλκός ή από μερικά από τα κράματά του. Ο άξονας εξόδου έχει ρουλεμάν. Μπορούν να προστεθούν λιπαντικά 
Ηλεκτρικό μέρος 

Εγκέφαλοι που ελέγχουν την κατεύθυνση και την ταχύτητα περιστροφής, ένα μεταβλητό rezjuk και ένας ηλεκτροκινητήρας.
Και τώρα, προσοχή, "life hack", πώς να μετατρέψετε έναν κανονικό σερβομηχανισμό σε σερβο σταθερής περιστροφής 
Στο πρωτότυπο, η μεταβλητή είναι κολλημένη με τον άξονά της στον άξονα εξόδου από το εσωτερικό του σερβομηχανισμού, στον τροποποιημένο άξονα, προφανώς, δαγκώθηκε / κόπηκε στο στάδιο συναρμολόγησης, η αντίσταση έχει ρυθμιστεί στην κεντρική θέση έτσι ώστε η Ο άξονας δεν περιστρέφεται σε κατάσταση ηρεμίας. Εάν προχωρήσετε παρακάτω, μπορείτε να το πετάξετε εντελώς και να το αντικαταστήσετε με 2 ίδιες σταθερές αντιστάσεις, είναι βολικό να βάλετε κάτι smd-shnoe στον πίνακα ελέγχου.
Σύνολο:
serva ως serva, όχι χώρος, αλλά όχι καταναλωτικά αγαθά,
μπορεί να βρεθεί φθηνότερα και με μεταλλικό κιβώτιο ταχυτήτων
ΥΣΤΕΡΟΓΡΑΦΟ
Όπως σωστά σημειώθηκε στα σχόλια, ξέχασα τελείως να αναφέρω πώς ελέγχεται ο σερβομηχανισμός, ο σερβομηχανισμός τροφοδοτείται από 5-6 βολτ και ένα σήμα ppm μέσω του τρίτου καλωδίου.
Οι πιο συνηθισμένες επιλογές ελέγχου:
1) συνδέουμε την τροφοδοσία από τη μία πλευρά, από την άλλη, την έξοδο για 3 «καταναλωτές» (διακομιστές, κινητήρες κ.λπ.) ισχύ και σήμα PPM, μπορείτε να ρυθμίσετε την ταχύτητα και την κατεύθυνση περιστροφής του σερβομηχανισμού με το κουμπί
2) Ο εξοπλισμός RC στον δέκτη εξάγει το ίδιο σήμα ppm.
3) οδηγείτε ένα arduino
βίντεο
pps
Ως αποτέλεσμα της "τροποποίησης", ο σερβομηχανισμός έχει χάσει την ανάδραση, οι εγκέφαλοι δεν γνωρίζουν την πραγματική θέση του άξονα και την κατεύθυνση περιστροφής, σκεφτείτε αυτήν τη στιγμή εάν πρόκειται να το αγοράσετε.


















