Servo mit kontinuierlicher Drehung. Arduino SG90, MG995, MG996 Servos: Schaltplan und Steuerung Bürstenlose und bürstenlose Motoren
Dieser Artikel behandelt Servos: Ihr Gerät, Zweck, Tipps zum Anschließen und Steuern, Servotypen und deren Vergleich. Fangen wir an und beginnen mit dem, was ein Servo ist.
Das Konzept eines Servos
Unter einem Servoantrieb wird meist ein Mechanismus mit einem Elektromotor verstanden, der aufgefordert werden kann, sich in einen bestimmten Winkel zu drehen und diese Position zu halten. Dies ist jedoch keine vollständige Definition.
Genauer gesagt ist ein Servoantrieb ein Antrieb mit Steuerung durch negative Rückkopplung, wodurch Sie die Bewegungsparameter genau steuern können. Ein Servoantrieb ist jede Art von mechanischem Antrieb, der einen Sensor (Position, Geschwindigkeit, Kraft usw.) und eine Antriebssteuereinheit umfasst, die automatisch die erforderlichen Parameter auf dem Sensor und dem Gerät entsprechend einem gegebenen externen Wert verwaltet.
Mit anderen Worten:
Als Input erhält der Servoregler den Wert des Regelparameters. Zum Beispiel der Drehwinkel.
Das Steuergerät vergleicht diesen Wert mit dem Wert an seinem Sensor.
Basierend auf dem Ergebnis des Vergleichs führt der Antrieb eine Aktion durch, wie z. B. Wenden, Beschleunigen oder Verzögern, damit der Wert des internen Sensors dem Wert der externen Regelgröße so nahe wie möglich kommt.
Am gebräuchlichsten sind Servos, die einen bestimmten Winkel halten, und Servos, die eine bestimmte Rotationsgeschwindigkeit beibehalten.
Ein typisches Hobby-Servo ist unten abgebildet.
Wie sind die Servos angeordnet?
Servogerät
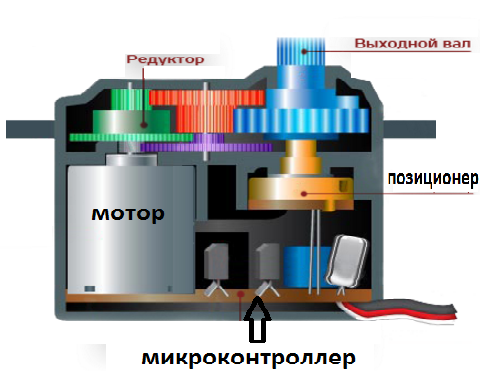
Servoantriebe bestehen aus mehreren Komponenten.

Antrieb - Elektromotor mit Getriebe. Um Strom in mechanische Rotation umzuwandeln, benötigen Sie Elektromotor. Die Drehzahl des Motors ist jedoch oft zu hoch für den praktischen Einsatz. Wird verwendet, um die Geschwindigkeit zu verlangsamen Reduzierer: ein Getriebemechanismus, der Drehmoment überträgt und umwandelt.
Durch Ein- und Ausschalten des Elektromotors können wir die Ausgangswelle drehen - das letzte Zahnrad des Servos, an dem wir etwas anbringen können, das wir steuern möchten. Damit die Position jedoch vom Gerät kontrolliert werden kann, Rückkopplungssensor - Encoder, der den Lenkwinkel wieder in ein elektrisches Signal umwandelt. Häufig wird hierfür ein Potentiometer verwendet. Beim Drehen des Potentiometer-Schiebers ändert sich sein Widerstand proportional zum Drehwinkel. Somit kann es verwendet werden, um die aktuelle Position des Mechanismus einzustellen.
Neben Elektromotor, Getriebe und Potentiometer verfügt der Servoantrieb über eine elektronische Füllung, die dafür zuständig ist, einen externen Parameter zu empfangen, Werte vom Potentiometer auszulesen, zu vergleichen und den Motor ein- / auszuschalten. Sie ist dafür verantwortlich, negatives Feedback aufrechtzuerhalten.
Es gehen drei Drähte zum Servo. Zwei davon sind für die Stromversorgung des Motors zuständig, der dritte liefert ein Steuersignal, mit dem die Position des Geräts eingestellt wird.
Nun wollen wir sehen, wie man das Servo extern steuert.
Servosteuerung. Steuersignalschnittstelle
Um dem Servo die gewünschte Position anzuzeigen, muss ein Steuersignal über die dafür vorgesehene Leitung gesendet werden. Steuersignal - Impulse mit konstanter Frequenz und variabler Breite.

Die Position, die das Servo einnehmen soll, hängt von der Länge der Impulse ab. Wenn ein Signal in den Steuerkreis eintritt, erzeugt der darin enthaltene Impulsgenerator einen eigenen Impuls, dessen Dauer durch ein Potentiometer bestimmt wird. Ein anderer Teil der Schaltung vergleicht die Dauer der beiden Impulse. Wenn die Dauer unterschiedlich ist, wird der Elektromotor eingeschaltet. Die Drehrichtung wird dadurch bestimmt, welcher der Impulse kürzer ist. Sind die Impulslängen gleich, stoppt der Elektromotor.
Am häufigsten werden bei Hobby-Servos Impulse mit einer Frequenz von 50 Hz erzeugt. Das bedeutet, dass alle 20 ms ein Impuls gesendet und empfangen wird. Typischerweise bedeutet eine Pulsdauer von 1520 µs, dass das Servo die Mittelstellung einnehmen soll. Durch Erhöhen oder Verringern der Impulslänge dreht sich der Servo im bzw. gegen den Uhrzeigersinn. Dabei gibt es Ober- und Untergrenzen der Pulsdauer. In der Servobibliothek für Arduino sind die Standardimpulslängen 544 µs für 0° und 2400 µs für 180°.
Bitte beachten Sie, dass bei Ihrem Gerät die Werkseinstellungen von den Standardeinstellungen abweichen können. Einige Servos verwenden eine Impulsbreite von 760 µs. Die Mittelstellung entspricht dabei 760 µs, ebenso wie bei herkömmlichen Servoantrieben entspricht die Mittelstellung 1520 µs.
Es ist auch erwähnenswert, dass dies nur allgemein akzeptierte Längen sind. Selbst innerhalb desselben Servomodells kann ein Herstellungsfehler auftreten, der dazu führt, dass der Betriebsbereich der Impulslängen leicht unterschiedlich ist. Für einen präzisen Betrieb muss jedes spezifische Servo kalibriert werden: Durch Experimente muss der richtige Bereich ausgewählt werden, der für ihn spezifisch ist.
Was es sonst noch wert ist, beachtet zu werden, ist die Verwirrung in der Terminologie. Oft wird die Art Servos anzusteuern PWM / PWM (Pulse Width Modulation) oder PPM (Pulse Position Modulation) genannt. Dies ist nicht der Fall, und die Verwendung dieser Methoden kann sogar das Laufwerk beschädigen. Der korrekte Begriff ist PDM (Pulse Duration Modulation). Dabei ist die Länge der Impulse äußerst wichtig und die Häufigkeit ihres Auftretens nicht so wichtig. 50 Hz ist die Norm, aber das Servo funktioniert sowohl bei 40 als auch bei 60 Hz korrekt. Das einzige, was zu beachten ist, ist, dass es bei starker Frequenzabnahme ruckartig und mit reduzierter Leistung arbeiten kann und bei starker Frequenzerhöhung (z. B. 100 Hz) überhitzen und ausfallen kann.
Servo-Spezifikationen
Lassen Sie uns nun herausfinden, was Servos sind und welche Eigenschaften sie haben.
Drehmoment und Drehzahl
Lassen Sie uns zunächst über zwei sehr wichtige Eigenschaften eines Servos sprechen: Drehmoment und über Drehgeschwindigkeit.
Das Kraftmoment oder Drehmoment ist eine vektorielle physikalische Größe, die gleich dem Produkt des Radiusvektors ist, der von der Rotationsachse bis zum Angriffspunkt der Kraft durch den Vektor dieser Kraft gezogen wird. Charakterisiert die rotatorische Krafteinwirkung auf einen starren Körper.

Einfach ausgedrückt zeigt diese Kennlinie an, wie schwer das Servo in der Lage ist, eine Last auf einem Hebel einer bestimmten Länge in Ruhe zu halten. Wenn das Drehmoment des Servos 5 kg × cm beträgt, bedeutet dies, dass das Servo einen 1 cm langen Hebel am Gewicht in horizontaler Position hält, an dessen freiem Ende 5 kg hängen. Oder äquivalent ein 5 cm langer Hebel, an dem 1 kg hängt.
Die Servogeschwindigkeit wird anhand der Zeit gemessen, die der Servoarm benötigt, um sich um 60° zu drehen. Eine Kennlinie von 0,1s/60° bedeutet, dass das Servo in 0,1s um 60° dreht. Daraus lässt sich die Geschwindigkeit leicht in einem bekannteren Wert, Umdrehungen pro Minute, berechnen, aber es kam vor, dass bei der Beschreibung von Servos eine solche Einheit am häufigsten verwendet wird.
Es ist erwähnenswert, dass Sie manchmal einen Kompromiss zwischen diesen beiden Eigenschaften finden müssen, denn wenn wir ein zuverlässiges, belastbares Servo wollen, müssen wir darauf vorbereitet sein, dass sich diese mächtige Installation langsam dreht. Und wenn wir einen sehr schnellen Antrieb wollen, dann wird es relativ einfach sein, ihn aus dem Gleichgewicht zu bringen. Bei Verwendung des gleichen Motors wird die Balance durch die Konfiguration der Zahnräder im Getriebe bestimmt.
Natürlich können wir immer eine Pflanze nehmen, die mehr Strom verbraucht, solange ihre Eigenschaften unseren Bedürfnissen entsprechen.
Formfaktor
Servos variieren in der Größe. Und obwohl es keine offizielle Klassifizierung gibt, halten sich die Hersteller seit langem an mehrere Größen mit einer allgemein akzeptierten Anordnung von Befestigungselementen. Sie können unterteilt werden in:
klein
Standard
Sie haben folgende charakteristische Abmessungen:
Es gibt auch sogenannte „Sondertypen“-Servos mit Abmessungen, die nicht in diese Klassifizierung fallen, aber der Anteil solcher Servos ist sehr gering.
Interne Schnittstelle
Servoantriebe sind entweder analog oder digital. Was sind also ihre Unterschiede, Vor- und Nachteile?
Äußerlich unterscheiden sie sich nicht: Elektromotoren, Getriebe, Potentiometer sind gleich, sie unterscheiden sich nur in der internen Steuerelektronik. Statt eines speziellen analogen Servochips ist auf der Platine das digitale Pendant mit einem Mikroprozessor zu sehen, der Impulse empfängt, auswertet und den Motor steuert. Bei der physikalischen Version besteht der Unterschied also nur in der Art und Weise, wie die Impulse verarbeitet und der Motor angesteuert wird.

Beide Servotypen nehmen die gleichen Steuerimpulse auf. Das analoge Servo entscheidet dann, ob die Position geändert wird und sendet gegebenenfalls ein Signal an den Motor. Dies geschieht normalerweise bei einer Frequenz von 50 Hz. Somit erhalten wir 20 ms - die minimale Reaktionszeit. Zu diesem Zeitpunkt kann jeder äußere Einfluss die Position des Servos verändern. Aber das ist nicht das einzige Problem. Im Ruhezustand liegt keine Spannung am Elektromotor an, bei einer leichten Abweichung vom Gleichgewicht wird dem Elektromotor ein kurzes Signal geringer Leistung zugeführt. Je größer die Abweichung, desto stärker das Signal. Daher kann der Servo bei kleinen Abweichungen den Motor nicht schnell drehen oder ein großes Drehmoment entwickeln. "Tote Zonen" werden in Zeit und Entfernung gebildet.
Diese Probleme können durch Erhöhung der Empfangsfrequenz, Signalverarbeitung und Motorsteuerung gelöst werden. Digitale Servos verwenden einen speziellen Prozessor, der Steuerimpulse empfängt, verarbeitet und Signale mit einer Frequenz von 200 Hz oder mehr an den Motor sendet. Es stellt sich heraus, dass das digitale Servo schneller auf äußere Einflüsse reagieren kann, schneller die erforderliche Geschwindigkeit und das erforderliche Drehmoment entwickelt, was bedeutet, dass es besser ist, eine bestimmte Position zu halten, was gut ist. Gleichzeitig verbraucht es natürlich mehr Strom. Außerdem sind digitale Servos schwieriger herzustellen und daher merklich teurer. Diese beiden Nachteile sind eigentlich alle Nachteile, die Digitalservos haben. Technisch schlagen sie analoge Servos bedingungslos.
Ausrüstungsmaterialien
Zahnräder für Servos gibt es in verschiedenen Materialien: Kunststoff, Carbon, Metall. Alle von ihnen sind weit verbreitet, die Wahl hängt von der spezifischen Aufgabe ab und davon, welche Eigenschaften in der Installation erforderlich sind.

Zahnräder aus Kunststoff, meist Nylon, sind sehr leicht, unterliegen keinem Verschleiß und werden am häufigsten in Servoantrieben verwendet. Sie halten großen Belastungen nicht stand, aber wenn die Belastungen gering sein sollen, dann sind Zahnräder aus Nylon die beste Wahl.
Carbonzahnräder sind langlebiger, verschleißen praktisch nicht und sind um ein Vielfaches stärker als Nylonzahnräder. Der Hauptnachteil sind die hohen Kosten.
Zahnräder aus Metall sind am schwersten, können aber höchsten Belastungen standhalten. Sie nutzen sich ziemlich schnell ab, sodass Sie fast jede Saison die Gänge wechseln müssen. Titanzahnräder sind die Favoriten unter den Metallzahnrädern, sowohl hinsichtlich der technischen Eigenschaften als auch des Preises. Leider werden sie Sie ziemlich viel kosten.
Gebürstete und bürstenlose Motoren
Es gibt drei Arten von Servomotoren: herkömmlicher Kernmotor, kernloser Motor und bürstenloser Motor.

Ein herkömmlicher Kernmotor (rechts) hat einen dichten Eisenrotor mit Drahtwicklungen und Magneten darum herum. Der Rotor hat mehrere Abschnitte, so dass der Rotor beim Drehen des Motors den Motor leicht vibrieren lässt, wenn die Abschnitte die Magnete passieren, was zu einem Servo führt, das vibriert und weniger genau ist als ein kernloses Motorservo. Der Hohlläufermotor (links) hat einen einzelnen Magnetkern mit einer zylinder- oder glockenförmigen Wicklung um den Magneten. Das kernlose Design ist leichter und hat keine Abschnitte, was zu einer schnelleren Reaktion und einem reibungslosen, vibrationsfreien Betrieb führt. Diese Motoren sind teurer, bieten aber ein höheres Maß an Kontrolle, Drehmoment und Geschwindigkeit als Standardmotoren.

Servoantriebe mit einem bürstenlosen Motor sind vor relativ kurzer Zeit aufgetaucht. Die Vorteile sind die gleichen wie bei anderen bürstenlosen Motoren: Es gibt keine Bürsten, was bedeutet, dass sie keinen Rotationswiderstand erzeugen und nicht verschleißen, die Geschwindigkeit und das Drehmoment sind höher bei einer Stromaufnahme, die der der Kollektormotoren entspricht. Brushless-Motorservos sind die teuersten Servos, bieten aber eine bessere Leistung als Servos mit anderen Motortypen.
Verbindung zu Arduino
Viele Servos können direkt an den Arduino angeschlossen werden. Dazu kommen sie aus einem Kabel mit drei Drähten:
rot - Essen; wird an den 5V-Pin oder direkt an die Stromversorgung angeschlossen
braun oder schwarz - Erde
gelb oder weiß - Signal; verbindet sich mit dem Arduino-Digitalausgang.
Um eine Verbindung zum Arduino herzustellen, ist es praktisch, ein Port-Expander-Board wie Troyka Shield zu verwenden. Obwohl es mit ein paar zusätzlichen Drähten möglich ist, das Servo über das Steckbrett oder direkt an die Arduino-Pins anzuschließen.
Es ist möglich, Steuerimpulse selbst zu erzeugen, aber dies ist eine so häufige Aufgabe, dass die Servo-Standardbibliothek existiert, um sie zu vereinfachen.
Lebensmittelbeschränkung
Ein typisches Hobby-Servo zieht im Betrieb über 100 mA. Gleichzeitig ist Arduino in der Lage, bis zu 500 mA zu liefern. Wenn Sie also in einem Projekt ein leistungsstarkes Servo verwenden müssen, ist es sinnvoll, darüber nachzudenken, es in einem Stromkreis mit zusätzlicher Leistung zu isolieren.
Betrachten Sie das Beispiel für den Anschluss eines 12-V-Servos: 
Begrenzung der Anzahl der angeschlossenen Servos
Auf den meisten Arduino-Boards unterstützt die Servo-Bibliothek maximal 12 Servos, auf dem Arduino Mega steigt diese Zahl auf 48. Es gibt einen kleinen Nebeneffekt bei der Verwendung dieser Bibliothek: Wenn Sie nicht mit einem Arduino Mega arbeiten, wird es unmöglich Verwenden Sie die Funktion analogWrite () auf den Pins 9 und 10, unabhängig davon, ob Servos an diesen Pins angeschlossen sind oder nicht. Bis zu 12 Servos können an den Arduino Mega angeschlossen werden, ohne die PWM/PWM-Funktion zu unterbrechen, wenn wir mehr Servos verwenden, können wir analogWrite() nicht auf Pins 11 und 12 verwenden.
Funktionalität der Servobibliothek
Die Servobibliothek ermöglicht die Softwaresteuerung von Servos. Dazu wird eine Variable vom Typ Servo angelegt. Die Verwaltung erfolgt durch die folgenden Funktionen:
Attach() - Hängt eine Variable an einen bestimmten Pin an. Es gibt zwei mögliche Syntaxen für diese Funktion: servo.attach(pin) und servo.attach(pin, min, max) . Dabei ist pin die Nummer des Pins, an dem das Servo angeschlossen ist, min und max sind die Impulslängen in Mikrosekunden, die für die Drehwinkel von 0° und 180° verantwortlich sind. Standardmäßig sind sie auf 544 µs bzw. 2400 µs eingestellt.
write() - weist den Servo an, einen Parameterwert zu akzeptieren. Die Syntax lautet: servo.write(angle) wobei angle der Winkel ist, in dem sich das Servo drehen soll.
writeMicroseconds() - gibt einen Befehl zum Senden eines Impulses einer bestimmten Länge an den Servo, ist ein Low-Level-Analogon des vorherigen Befehls. Die Syntax lautet: servo.writeMicroseconds(uS) wobei uS die Länge des Impulses in Mikrosekunden ist.
read() - liest den aktuellen Wert des Winkels, in dem sich das Servo befindet. Die Syntax lautet: servo.read() gibt einen ganzzahligen Wert zwischen 0 und 180 zurück.
Attached() – Überprüft, ob eine Variable an einen bestimmten Pin angehängt wurde. Die Syntax lautet: servo.attached() gibt den booleschen Wert „true“ zurück, wenn die Variable an einen Pin angehängt wurde, andernfalls „false“.
disconnect() - führt die entgegengesetzte Aktion von attachment() aus, d. h. trennt die Variable von dem Pin, dem sie zugewiesen wurde. Die Syntax lautet: servo.detach() .
Alle Methoden der Servo2-Bibliothek sind mit den Servo-Methoden identisch.
Ein Beispiel für die Verwendung der Servo-Bibliothek
Anstelle eines Fazits
Servoantriebe sind anders, einige sind besser - andere sind billiger, einige sind zuverlässiger - andere sind genauer. Und bevor Sie ein Servo kaufen, sollten Sie bedenken, dass es möglicherweise nicht die besten Eigenschaften hat, solange es für Ihr Projekt geeignet ist. Viel Glück bei Ihren Bemühungen!
In diesem Artikel werden wir über Servos in Arduino-Projekten sprechen. Dank Servomotoren werden gewöhnliche elektronische Projekte zu Robotern. Wenn Sie ein Servo an ein Arduino-Projekt anschließen, können Sie auf Sensorsignale mit einer präzisen Bewegung reagieren, z. B. eine Tür öffnen oder Sensoren in die richtige Richtung drehen. Der Artikel behandelt die Probleme der Steuerung von Servos, mögliche Schemata zum Anschließen eines Servos an ein Arduino sowie Beispiele für Skizzen.
Ein Servoantrieb ist eine Art Antrieb, der Bewegungsparameter präzise steuern kann. Mit anderen Worten, es ist ein Motor, der seine Welle um einen bestimmten Winkel drehen oder eine kontinuierliche Rotation in einem bestimmten Zeitraum aufrechterhalten kann.
Der Betrieb des Servos basiert auf der Verwendung von Feedback (einem geschlossenen Schaltkreis, bei dem das Signal am Eingang und am Ausgang nicht angepasst ist). Als Servoantrieb kann jede Art von mechanischem Antrieb fungieren, der einen Sensor und eine Steuereinheit umfasst, die automatisch alle eingestellten Parameter am Sensor beibehält. Der Aufbau des Servoantriebs besteht aus einem Motor, einem Positionssensor und einer Steuerung. Die Hauptaufgabe solcher Geräte ist die Implementierung im Bereich der Servomechanismen. Auch in Bereichen wie Materialbearbeitung, Fahrzeugbau, Holzverarbeitung, Blechfertigung, Baustofffertigung und anderen werden Servoantriebe häufig eingesetzt.
In Arduino-Robotikprojekten wird ein Servo häufig für einfache mechanische Aktionen verwendet:
- Drehen Sie den Entfernungsmesser oder andere Sensoren in einem bestimmten Winkel, um die Entfernung im engen Sichtfeld des Roboters zu messen.
- Machen Sie einen kleinen Schritt mit dem Fuß, bewegen Sie die Gliedmaßen oder den Kopf.
- Robotermanipulatoren zu erstellen.
- Um den Lenkmechanismus zu implementieren.
- Öffnen oder schließen Sie eine Tür, Klappe oder ein anderes Objekt.
Natürlich ist der Anwendungsbereich von Servos in realen Projekten viel größer, aber die angegebenen Beispiele sind die beliebtesten Schaltungen.
Schema und Arten von Servos
Das Funktionsprinzip eines Servos basiert auf der Rückkopplung von einem oder mehreren Systemsignalen. Der Ausgangsindikator wird dem Eingang zugeführt, wo sein Wert mit der Einstellaktion verglichen wird und die erforderlichen Aktionen ausgeführt werden - beispielsweise wird der Motor abgestellt. Die einfachste Implementierung ist ein variabler Widerstand, der von einer Welle gesteuert wird - wenn sich die Parameter des Widerstands ändern, ändern sich die Parameter des Stroms, der den Motor versorgt.
Bei echten Servos ist der Steuermechanismus viel komplizierter und verwendet eingebaute Controller-Chips. Abhängig von der Art des verwendeten Rückkopplungsmechanismus gibt es analog Und Digital Servos. Erstere verwenden etwas, das wie ein Potentiometer aussieht, letztere verwenden Controller.
 Die gesamte Servosteuerschaltung befindet sich im Inneren des Gehäuses, Steuersignale und Strom werden in der Regel über drei Drähte zugeführt: Masse, Versorgungsspannung und Steuersignal.
Die gesamte Servosteuerschaltung befindet sich im Inneren des Gehäuses, Steuersignale und Strom werden in der Regel über drei Drähte zugeführt: Masse, Versorgungsspannung und Steuersignal.
360-, 180- und 270-Grad-Servo mit kontinuierlicher Drehung
Es gibt zwei Haupttypen von Servomotoren - mit kontinuierlicher Drehung und mit einem festen Winkel (meistens 180 oder 270 Grad). Der Unterschied zwischen einem Servo mit begrenzter Drehung liegt in den mechanischen Konstruktionselementen, die die Bewegung der Welle außerhalb der durch die Parameter angegebenen Winkel blockieren können. Nach Erreichen eines Winkels von 180 wirkt die Welle auf den Begrenzer und er gibt den Befehl, den Motor auszuschalten. Servomotoren mit kontinuierlicher Drehung haben keine solchen Begrenzer.
Materialien für Servogetriebe
Bei den meisten Servos ist die Verbindung zwischen der Welle und den externen Elementen ein Zahnrad, daher ist es sehr wichtig, aus welchem Material es besteht. Es gibt zwei am häufigsten verfügbare Optionen: Metall- oder Kunststoffzahnräder. In teureren Modellen finden Sie Elemente aus Carbon und sogar Titan.


Kunststoffvarianten sind natürlich billiger, einfacher herzustellen und werden oft in preiswerten Servomodellen verwendet. Bei Trainingsprojekten, wenn das Servo mehrere Bewegungen macht, ist das kein Problem. Aber in ernsthaften Projekten ist der Einsatz von Kunststoff angesichts des sehr schnellen Verschleißes solcher Zahnräder unter Belastung unmöglich.
 Metallgetriebe sind zuverlässiger, aber das wirkt sich natürlich sowohl auf den Preis als auch auf das Gewicht des Modells aus. Sparsame Hersteller können einige der Teile aus Kunststoff und einige aus Metall herstellen, dies sollte auch berücksichtigt werden. Und natürlich, dass bei den billigsten Modellen selbst das Vorhandensein eines Metallzahnrads keine Garantie für Qualität ist.
Metallgetriebe sind zuverlässiger, aber das wirkt sich natürlich sowohl auf den Preis als auch auf das Gewicht des Modells aus. Sparsame Hersteller können einige der Teile aus Kunststoff und einige aus Metall herstellen, dies sollte auch berücksichtigt werden. Und natürlich, dass bei den billigsten Modellen selbst das Vorhandensein eines Metallzahnrads keine Garantie für Qualität ist.
Zahnräder aus Titan oder Carbon sind die beste Option, wenn Sie ein begrenztes Budget haben. Solche Servos sind leicht und zuverlässig und werden häufig verwendet, um Modelle von Autos, Drohnen und Flugzeugen zu erstellen.
Vorteile von Servomotoren
Die weit verbreitete Verwendung von Servoantrieben beruht auf der Tatsache, dass sie einen stabilen Betrieb, eine hohe Störfestigkeit, eine geringe Größe und einen großen Bereich der Geschwindigkeitssteuerung aufweisen. Wichtige Merkmale von Servoantrieben sind die Fähigkeit, die Leistung zu erhöhen und Feedback-Informationen bereitzustellen. Daraus folgt, dass die Schaltung in Vorwärtsrichtung ein Energieübertrager und in Rückwärtsrichtung ein Informationsübermittler ist, der zur Verbesserung der Steuergenauigkeit verwendet wird.
Unterschiede zwischen Servo- und konventionellem Motor
Durch Ein- oder Ausschalten eines herkömmlichen Elektromotors können wir eine Drehbewegung erzeugen und Räder oder andere an der Welle befestigte Objekte in Bewegung setzen. Diese Bewegung wird kontinuierlich sein, aber um zu verstehen, um welchen Winkel sich die Welle gedreht hat oder wie viele Umdrehungen sie gemacht hat, müssen zusätzliche externe Elemente installiert werden: Encoder. Das Servo enthält bereits alles Notwendige, um Informationen über die aktuellen Rotationsparameter zu erhalten und kann sich selbst abschalten, wenn sich die Welle auf den gewünschten Winkel dreht.
Unterschiede zwischen Servo- und Schrittmotor
 Ein wichtiger Unterschied zwischen einem Servomotor und einem Schrittmotor ist die Fähigkeit, mit hohen Beschleunigungen und mit variabler Last zu arbeiten. Servomotoren haben auch eine höhere Leistung. Schrittmotoren haben keine Rückkopplung, daher kann der Effekt des Schrittverlusts beobachtet werden, Schrittverlust ist bei Servomotoren ausgeschlossen - alle Verletzungen werden aufgezeichnet und korrigiert. Mit all diesen klaren Vorteilen sind Servomotoren teurer als Schrittmotoren, haben ein komplexeres Verdrahtungs- und Steuersystem und erfordern eine qualifiziertere Wartung. Es ist wichtig zu beachten, dass Schrittmotoren und Servoantriebe keine direkten Konkurrenten sind - jedes dieser Geräte hat seinen eigenen spezifischen Anwendungsbereich.
Ein wichtiger Unterschied zwischen einem Servomotor und einem Schrittmotor ist die Fähigkeit, mit hohen Beschleunigungen und mit variabler Last zu arbeiten. Servomotoren haben auch eine höhere Leistung. Schrittmotoren haben keine Rückkopplung, daher kann der Effekt des Schrittverlusts beobachtet werden, Schrittverlust ist bei Servomotoren ausgeschlossen - alle Verletzungen werden aufgezeichnet und korrigiert. Mit all diesen klaren Vorteilen sind Servomotoren teurer als Schrittmotoren, haben ein komplexeres Verdrahtungs- und Steuersystem und erfordern eine qualifiziertere Wartung. Es ist wichtig zu beachten, dass Schrittmotoren und Servoantriebe keine direkten Konkurrenten sind - jedes dieser Geräte hat seinen eigenen spezifischen Anwendungsbereich.
Wo kann man beliebte SG90, MG995, MG996 Servos kaufen
 Die günstigste SG90 1,6 kg Servooption Die günstigste SG90 1,6 kg Servooption
|
 Servos SG90 und MG90S für Arduino zu einem Preis unter 70 Rubel Servos SG90 und MG90S für Arduino zu einem Preis unter 70 Rubel
|
 Eine weitere SG90 Pro 9g-Servooption von einem vertrauenswürdigen Lieferanten auf Ali Eine weitere SG90 Pro 9g-Servooption von einem vertrauenswürdigen Lieferanten auf Ali
|
 Servo SG90 vom zuverlässigen Lieferanten RobotDyn Servo SG90 vom zuverlässigen Lieferanten RobotDyn
|
 Servotester Servotester
|
 Mehrere Servotester-Optionen Mehrere Servotester-Optionen
|
 Geschütztes Servo mit 15 kg Drehmoment Geschütztes Servo mit 15 kg Drehmoment
|
 Servo JX DC5821LV 21KG Vollständige wasserdichte Core Mental Gear 1/8 1/10 RC Car Scaler Buggy Crawler TRAXXAS RC4WD TRX-4 SCX10 D90 Servo JX DC5821LV 21KG Vollständige wasserdichte Core Mental Gear 1/8 1/10 RC Car Scaler Buggy Crawler TRAXXAS RC4WD TRX-4 SCX10 D90
|
 Servo MG996R MG996 Servo Metallgetriebe für Futaba JR Servo MG996R MG996 Servo Metallgetriebe für Futaba JR
|
 Servo 13KG 15KG Servos Digital MG995 MG996 MG996R Servo Metal Gear Servo 13KG 15KG Servos Digital MG995 MG996 MG996R Servo Metal Gear
|
 Entscheidend bei der Ansteuerung von Servos ist das Steuersignal, ein Impuls konstanter Frequenz und variabler Breite. Die Impulslänge ist einer der wichtigsten Parameter, der die Position des Servos bestimmt. Diese Länge kann manuell im Programm mit der Auswahlmethode durch die Ecke oder mit den Bibliotheksbefehlen eingestellt werden. Für jede Gerätemarke kann die Länge unterschiedlich sein.
Entscheidend bei der Ansteuerung von Servos ist das Steuersignal, ein Impuls konstanter Frequenz und variabler Breite. Die Impulslänge ist einer der wichtigsten Parameter, der die Position des Servos bestimmt. Diese Länge kann manuell im Programm mit der Auswahlmethode durch die Ecke oder mit den Bibliotheksbefehlen eingestellt werden. Für jede Gerätemarke kann die Länge unterschiedlich sein.
Wenn das Signal in den Steuerkreis eintritt, gibt der Generator seinen Impuls ab, dessen Dauer mit einem Potentiometer bestimmt wird. In einem anderen Teil der Schaltung wird die Dauer des angelegten Signals und des Signals vom Generator verglichen. Sind diese Signale unterschiedlich lang, wird der Elektromotor eingeschaltet, dessen Drehrichtung dadurch bestimmt wird, welcher der Impulse kürzer ist. Wenn die Impulslängen gleich sind, stoppt der Motor.
 Die Standardfrequenz, mit der Impulse angelegt werden, beträgt 50 Hz, dh 1 Impuls pro 20 Millisekunden. Bei diesen Werten beträgt die Dauer 1520 Mikrosekunden und das Servo befindet sich in Mittelstellung. Das Ändern der Impulslänge führt zur Drehung des Servos - mit zunehmender Dauer erfolgt die Drehung im Uhrzeigersinn, mit abnehmender - gegen den Uhrzeigersinn. Es gibt Dauerbegrenzungen - in Arduino ist in der Servobibliothek für 0 ° die Impulswertigkeit auf 544 μs (untere Grenze) eingestellt, für 180 ° - 2400 μs (obere Grenze).
Die Standardfrequenz, mit der Impulse angelegt werden, beträgt 50 Hz, dh 1 Impuls pro 20 Millisekunden. Bei diesen Werten beträgt die Dauer 1520 Mikrosekunden und das Servo befindet sich in Mittelstellung. Das Ändern der Impulslänge führt zur Drehung des Servos - mit zunehmender Dauer erfolgt die Drehung im Uhrzeigersinn, mit abnehmender - gegen den Uhrzeigersinn. Es gibt Dauerbegrenzungen - in Arduino ist in der Servobibliothek für 0 ° die Impulswertigkeit auf 544 μs (untere Grenze) eingestellt, für 180 ° - 2400 μs (obere Grenze).

(Verwendetes Bild von amperka.ru)
Es ist wichtig zu beachten, dass die Einstellungen auf einem bestimmten Gerät leicht von den allgemein akzeptierten Werten abweichen können. Bei einigen Geräten können die durchschnittliche Position und Impulsbreite 760 µs betragen. Alle akzeptierten Werte können auch aufgrund von Fehlern, die bei der Herstellung des Geräts zulässig sein können, geringfügig abweichen.
Die Ansteuerungsmethode des Antriebs wird oft fälschlicherweise als PWM/PWM bezeichnet, was aber nicht ganz richtig ist. Die Steuerung hängt direkt von der Impulslänge ab, die Häufigkeit ihres Auftretens ist nicht so wichtig. Sowohl bei 40 Hz als auch bei 60 Hz wird ein korrekter Betrieb gewährleistet, nur eine starke Reduzierung oder Erhöhung der Frequenz trägt dazu bei. Bei einem starken Abfall beginnt der Servoantrieb ruckartig zu arbeiten, wenn die Frequenz über 100 Hz erhöht wird, kann das Gerät überhitzen. Daher ist es richtiger, PDM zu nennen.
Je nach interner Schnittstelle werden analoge und digitale Servos unterschieden. Äußerlich gibt es keine Unterschiede - alle Unterschiede liegen nur in der internen Elektronik. Ein analoger Servoantrieb enthält einen speziellen Mikroschaltkreis im Inneren, ein digitaler enthält einen Mikroprozessor, der Impulse empfängt und analysiert.

Beim Empfang eines Signals entscheidet der analoge Servo, ob die Position bewegt wird oder nicht, und sendet gegebenenfalls ein Signal mit einer Frequenz von 50 Hz an den Motor. Während der Reaktionszeit (20 ms) können äußere Einflüsse auftreten, die die Position des Servos verändern, und das Gerät hat keine Zeit zu reagieren. Das digitale Servo verwendet einen Prozessor, der Signale mit einer höheren Frequenz sendet und verarbeitet - ab 200 Hz, damit es schneller auf äußere Einflüsse reagieren kann, schnell die gewünschte Geschwindigkeit und das gewünschte Drehmoment entwickelt. Daher hält das digitale Servo die eingestellte Position besser. Gleichzeitig benötigen digitale Servos mehr Strom für den Betrieb, was ihre Kosten erhöht. Auch die Komplexität ihrer Herstellung trägt stark zum Preis bei. Der hohe Preis ist der einzige Nachteil von Digitalservos, technisch sind sie viel besser als analoge Geräte.
Anschließen eines Servomotors an ein Arduino
Das Servo hat drei Kontakte, die in verschiedenen Farben eingefärbt sind. Das braune Kabel führt zur Masse, das rote Kabel führt zu +5 V Strom, das orange oder gelbe Kabel ist Signal. Das Gerät wird wie in der Abbildung gezeigt über das Steckbrett mit Arduino verbunden. Das orangefarbene Kabel (Signal) ist mit dem digitalen Pin verbunden, schwarz und rot - mit Masse bzw. Strom. Um einen Servomotor anzusteuern, ist kein spezieller Anschluss an die Shim-Pins erforderlich – das Prinzip der Servoansteuerung haben wir bereits weiter oben beschrieben.

Es wird nicht empfohlen, leistungsstarke Servos direkt an die Platine anzuschließen. Sie erzeugen einen Strom, der für den Arduino-Stromkreis nicht mit dem Leben kompatibel ist - Sie haben Glück, wenn der Schutz funktioniert. Die häufigsten Symptome bei Überlastung und falscher Spannungsversorgung des Servos sind Servoruckeln, unangenehme Geräusche und Board-Reset. Für die Stromversorgung ist es besser, externe Quellen zu verwenden, achten Sie darauf, die Masse der beiden Schaltkreise zu kombinieren.
Skizze der Arduino-Servosteuerung
Die direkte Steuerung eines Servos durch Ändern der Impulsdauer in der Skizze ist keine triviale Aufgabe, aber glücklicherweise haben wir eine hervorragende Servobibliothek, die in die Arduino-Entwicklungsumgebung integriert ist. Wir werden alle Nuancen der Programmierung und Arbeit mit Servos in einem separaten Artikel betrachten. Hier geben wir das einfachste Beispiel für die Verwendung von Servo.
Der Arbeitsalgorithmus ist einfach:
- Zuerst schließen wir Servo.h ein
- Erstellen Sie ein Objekt der Servo-Klasse
- Geben Sie im Setup-Block an, an welchem Pin das Servo angeschlossen ist
- Wir verwenden die Methoden des Objekts in der üblichen C++-Weise. Am beliebtesten ist die Schreibmethode, der wir einen ganzzahligen Wert in Grad zuführen (bei einem 360-Servo werden diese Werte anders interpretiert).
Ein Beispiel für eine einfache Skizze zum Arbeiten mit einem Servo
Ein Beispiel für ein Projekt, bei dem wir den Servomotor sofort zuerst auf Nullwinkel stellen und dann um 90 Grad drehen.
#enthalten
Skizze für zwei Servos
Und in diesem Beispiel arbeiten wir mit zwei Servos gleichzeitig:
#enthalten
Servosteuerung mit Potentiometer
In diesem Beispiel drehen wir das Servo in Abhängigkeit von dem vom Potentiometer empfangenen Wert. Wir lesen den Wert aus und wandeln ihn mit der map-Funktion in einen Winkel um:
//Fragment des Standardbeispiels zur Verwendung der Servobibliothek void loop() ( val = analogRead(A0); // Lies den Wert von dem Pin, an dem das Potentiometer angeschlossen ist val = map(val, 0, 1023, 0, 180); // Konvertiere die Zahl im Bereich 0 bis 1023 in den neuen Bereich - 0 bis 180. servo.write(val); delay(15); )

Eigenschaften und Anschluss von SG-90
Wenn Sie das billigste und einfachste Servo kaufen möchten, dann ist das SG 90 die beste Wahl.Dieses Servo wird am häufigsten verwendet, um kleine, leichte Maschinen mit einem Drehwinkel von 0° bis 180° zu steuern.
Spezifikationen SG90:
- Bef0,12 s/60 Grad;
- Stromversorgung 4,8 V;
- Betriebstemperaturen von -30 °C bis 60 °C;
- Abmessungen 3,2 x 1,2 x 3 cm;
- Gewicht 9 gr.
Beschreibung von SG90
Drahtfarben sind Standard. Das Servo ist kostengünstig und bietet keine genauen Einstellungen für Start- und Endpositionen. Um unnötige Überlastungen und charakteristisches Knistern in den Positionen 0 und 180 Grad zu vermeiden, sollten die Extrempunkte besser bei 10° und 170° eingestellt werden. Beim Betrieb des Gerätes ist es wichtig, die Versorgungsspannung zu überwachen. Bei einer starken Überschätzung dieses Indikators können die mechanischen Elemente von Getrieben beschädigt werden.
MG995 und MG996 Tower Pro Servos
Das MG995-Servo ist das zweitbeliebteste Servomodell, das am häufigsten mit Arduino-Projekten verbunden wird. Dies sind relativ preiswerte Servos mit viel besserer Leistung als das SG90.
Technische Daten MG995
Die Ausgangswelle des MG995 dreht sich um 120 Grad (60 in jede Richtung), obwohl viele Verkäufer 180 Grad angeben. Das Gerät ist in einem Kunststoffgehäuse untergebracht.
- Gewicht 55 g;
- Drehmoment 8,5 kg x cm;
- Geschwindigkeit 0,2 s/60 Grad (bei 4,8 V);
- Arbeitsleistung 4,8 - 7,2 V;
- Betriebstemperaturen - von 0 ° C bis -55 ° C.
Beschreibung von MG995
Die Verbindung zum Arduino erfolgt ebenfalls über drei Drähte. Grundsätzlich ist es für Amateurprojekte erlaubt, das MG995 direkt an den Arduino anzuschließen, aber der Motorstrom wird immer eine gefährliche Last für die Eingänge der Platine erzeugen, daher wird empfohlen, die Servos trotzdem separat mit Strom zu versorgen und an den Anschluss zu denken Masse beider Stromkreise. Eine weitere Möglichkeit, die das Leben erleichtert, ist die Verwendung von vorgefertigten Servocontrollern und Shields, auf die wir in einem separaten Artikel eingehen werden.
Das MG996R ähnelt dem MG995 in Bezug auf die Funktionen, nur dass es in einem Metallgehäuse geliefert wird.
Umwandeln eines Servos in ein Servo mit kontinuierlicher Drehung
Wie oben beschrieben, wird der Servo durch Impulse mit variabler Breite gesteuert, die den Drehwinkel einstellen. Die aktuelle Position wird am Potentiometer abgelesen. Werden Welle und Potentiometer getrennt, nimmt der Stellmotor die Stellung des Potentiometerschleifers wie in der Mitte ein. Alle diese Aktionen führen dazu, dass das Feedback entfernt wird. Auf diese Weise können Sie die Geschwindigkeit und Drehrichtung auf dem Signaldraht steuern und ein Servo mit kontinuierlicher Drehung erstellen. Es ist wichtig zu beachten, dass sich ein Servo mit konstanter Drehung nicht um einen bestimmten Winkel drehen und eine genau festgelegte Anzahl von Umdrehungen ausführen kann.
Um die oben genannten Schritte auszuführen, müssen Sie das Gerät zerlegen und Änderungen am Design vornehmen.
In der Arduino IDE müssen Sie eine kleine Skizze erstellen, die die Wippe in die mittlere Position bringt.
#enthalten
Danach muss das Gerät mit dem Arduino verbunden werden. Nach dem Anschließen beginnt sich das Servo zu drehen. Es ist notwendig, den vollständigen Stopp durch Einstellen des Widerstands zu erreichen. Nachdem die Drehung aufhört, müssen Sie die Welle finden, das flexible Element herausziehen und wieder einbauen.
Diese Methode hat mehrere Nachteile - das Einstellen des Widerstands auf einen vollständigen Stopp ist instabil, bei der geringsten Erschütterung / Erwärmung / Abkühlung kann der eingestellte Nullpunkt verloren gehen. Daher ist es besser, das Potentiometer durch einen Trimmer zu ersetzen. Ziehen Sie dazu das Potentiometer heraus und ersetzen Sie es durch einen Trimmer mit dem gleichen Widerstand. Der Nullpunkt muss mit einer Kalibrierskizze justiert werden.
Jedes Verfahren zum Umwandeln eines Servos in ein Servo mit kontinuierlicher Rotation hat seine Nachteile. Erstens ist es schwierig, den Nullpunkt einzustellen, jede Bewegung kann ihn nach unten bringen. Zweitens ist der Regelbereich klein - bei einer kleinen Änderung der Impulsbreite kann sich die Geschwindigkeit erheblich ändern. Sie können den Bereich in Arduino programmgesteuert erweitern.
Fazit
Servoantriebe spielen in vielen Arduino-Projekten eine sehr wichtige Rolle, von der Robotik bis hin zu Smart-Home-Systemen. Alles, was mit Bewegung zu tun hat, erfordert traditionell Spezialkenntnisse und die Schaffung eines vollwertigen, korrekt funktionierenden Antriebs ist keine leichte Aufgabe. Aber mit Servomotoren können Sie die Aufgabe in vielen Fällen vereinfachen, sodass der Servo auch in Einsteigerprojekten ständig verwendet wird.
In diesem Artikel haben wir versucht, verschiedene Aspekte der Verwendung von Servos in Arduino-Projekten abzudecken: vom Verbinden bis zum Schreiben von Skizzen. Durch die Wahl des einfachsten Servomodells (z. B. sg 90) können Sie die angegebenen Beispiele problemlos wiederholen und Ihre ersten Projekte erstellen, in denen sich etwas bewegt und ändert. Wir hoffen, dass dieser Artikel Ihnen dabei helfen wird.
Die einfachsten der Roboter sind 2- oder 4-Rad. Ein solcher Roboter kann auf einem Chassis aus einem ferngesteuerten Auto basieren, aber vielleicht hat ihn nicht jeder zur Hand oder es ist schade, ihn zu vermasseln. Sie können das Chassis auch selbst herstellen, aber das Anbringen der Räder direkt am Motor ist keine sehr gute Lösung, der Motor muss aufgeladen werden, um langsamer zu werden, dazu benötigen Sie ein Getriebe. Ein fertiges Chassis oder ein Getriebe oder einen Motor mit Getriebe zu bekommen, stellte sich im Gegensatz zu Servos als keine so einfache Aufgabe heraus. Nahezu jeder Servoantrieb lässt sich problemlos in einen Motor mit Getriebe umbauen.
Räder können direkt auf den Schaukelstuhl eines solchen Motors geklebt werden, und der Servokörper ist bequem zu montieren.
AUFMERKSAMKEIT! Das Design anderer Servos kann abweichen, daher ist diese Anleitung nur ein Teil davon.
Als Basis wurde das einfachste und günstigste Servo genommen:

Zuerst zerlegen wir es.

Zuerst entfernen wir unnötige Elektronik, beißen den Treiber ab, wir steuern den Motor direkt. Als nächstes beginnen wir mit der Modifikation der Mechanik, entfernen das erste Zahnrad mit einer externen Welle und entfernen die Hubbegrenzung davon.



Wir nehmen den Widerstand heraus und beißen den Begrenzer heraus, der sich an seinem Körper befindet.

Wir sammeln alle Mechaniken wieder ein und prüfen, ob sich alles erfolgreich bewegt.
Der nächste Schritt besteht darin, den Draht an den Motor zu löten.

Wir bauen das ehemalige Servo zu einem neuen Motor mit Getriebe zusammen.
Alles ist bereit, wenn Sie keine Fehler gemacht haben, können Sie die Arbeit genießen.
Zur Demontage unseres Servos benötigen wir einen Schraubendreher. Weil Zerlege ich ein sehr kleines Servo, dann benötige ich einen passenden Schraubendreher. Persönlich verwende ich Schraubendreher aus einem billigen chinesischen Kit. Ich habe es an einem Kiosk in der Unterführung für etwa 5 $ gekauft, es ist also nicht sehr teuer.
Um das Servo zu öffnen, müssen Sie nur vier Schrauben lösen. Sie befinden sich auf der unteren Abdeckung. Abschrauben:

Nach dem Entfernen der Abdeckung können Sie die Steuereinheit sehen. Ich werde nicht ins Detail gehen, ich werde es trotzdem von hier entfernen. Sie können auch den Motor sehen, zu dem zwei Drähte führen.

Auf der Oberseite befindet sich auch eine Abdeckung, bei der Sie die Zahnräder des Getriebes sehen können. Es ist erwähnenswert, dass zwei davon am Potentiometer befestigt sind - dies ist sehr wichtig, da wir das Potentiometer tatsächlich brechen müssen, damit das Getriebe seine Funktion weiterhin erfüllen kann - wir verwenden es einfach als Achse für die Zahnräder.

Eigentlich ist es notwendig, alle Zahnräder aus dem Servoantrieb zu entfernen und für eine Weile beiseite zu legen. Wir nehmen das Potentiometer (es ist übrigens auch ein variabler Widerstand) aus dem Gehäuse, indem wir es vorsichtig mit einem Schraubendreher von der Unterseite des Servos drücken.

Dies ist der Moment des Point of no Return. Natürlich wird es immer möglich sein, alles zurückzulöten, aber das ist schon schwieriger. Also - Potentiometer abbeißen.

Dann trennen wir mit der gleichen Methode die Steuerplatine mit Strom- und Signalkabeln.

Dann beißen wir die Drähte vom Motor ab. Seien Sie hier vorsichtig und beißen Sie nicht die Kontakte vom Motor selbst ab - wenn Sie sich nicht sicher sind, lassen Sie den Draht besser mit einem Rand. Dann kann gelötet werden. Ich beiße den Draht bis zum Kontakt ab.


Machen wir eine Bestandsaufnahme.

Alles scheint vorhanden zu sein. Jetzt nehmen wir unser Potentiometer in die Hand.

Tatsache ist, dass es sich jetzt auch nur um einen bestimmten Winkel dreht. Und da es sich um eine Achse handelt und daran das größte Zahnrad befestigt ist, auf dem wir später das Rad tatsächlich montieren, müssen wir dafür sorgen, dass es sich ständig dreht. Wir nehmen zwei Metallplatten heraus, die dies verhindern. Wir bekommen:

Ich hoffe, die Fotos machen deutlich, was ich getan habe. Ich habe es mit einer kleinen Zange herausgerissen, da nichts passenderes zur Hand war.
Jetzt müssen Sie den Begrenzer am Zahnrad selbst schneiden. Es sieht aus wie ein Vorsprung von der Unterseite des Zahnrads. Es ist leicht zu finden, es sieht so aus.

Rezhem.

Und eigentlich können Sie danach damit beginnen, das Getriebe wieder in das Gehäuse einzubauen. Wir fügen die Achse, die wir früher aus dem Potentiometer gemacht haben, wieder ein.

Als nächstes einen Gang nach dem anderen, beginnend mit dem kleinsten. Seien Sie vorsichtig beim Einsetzen des letzten Zahnrads - es ist speziell an der Achse des ehemaligen Potentiometers befestigt, da die Spitze der Achse die Form eines Buchstabens hat D. Es ist notwendig, dass dieser Vorsprung in die Aussparung im Zahnrad gelangt. Es stellt sich etwas Ähnliches wie das folgende Bild heraus.

Die obere Abdeckung setzen wir auf das Getriebe, damit es bei weiteren Arbeiten nicht auseinander fällt.

Nun, es sind nicht mehr viele übrig. Wir nehmen einen Draht mit einem Stecker, den wir zuvor von der Platine abgebissen haben, und trennen die Verdrahtung darin. Sie sollten nicht aus großer Entfernung trennen, ein Zentimeter reicht tatsächlich aus.

Wir reinigen zwei davon (eigentlich alle, aber ich habe Rot und Grün verwendet). Es reicht aus, etwa 3 mm Isolierung abzuschneiden. Für unsere Zwecke - mehr als.

Wir biegen einfach den verbleibenden nicht abisolierten Draht, damit er uns nicht stört.

Kommen wir zu heiß. Es ist Zeit, den Lötkolben aufzuheizen. In der Zeit, in der der Lötkolben erhitzt wird, habe ich den Servoantrieb angenehmer im Griff gemacht.


Zuerst müssen wir die Reste des alten Lötzinns entfernen, die an den Motorkontakten verblieben sind. Ich mache das mit einer Entlötpumpe, wobei ich den Kontakt mit einem Lötkolben so weit vorheize, dass das Lötzinn schmilzt. Die Hauptsache dabei ist, es nicht zu übertreiben - die hintere Abdeckung des Motors ist immer noch aus Kunststoff und erwärmt sich nicht lange. Der Ablauf sieht in etwa so aus:


Ich verstehe, dass es möglich und nicht sehr auffällig ist, was ich getan habe, aber es war praktisch kein Lötmittel mehr auf den Kontakten, was ich erreichen wollte.

Es gibt wunderbare Artikel über das Löten in DI HALT "a. Er ist im Allgemeinen ein Genie, wie mir scheint. Link zu seinem Blog, es gibt eine Menge Dinge neben dem Löten, in der Tat, einfach suchen.
Kurzum, um gut löten zu können, muss man am Anfang immer das alte Lötzinn loswerden.
Es bleiben zwei Drähte zu löten. Wer sich mit Löten auskennt - in 5 Sekunden zurecht. Wer wie ich zum zweiten Mal in meinem Leben normalerweise zum Lötkolben gegriffen hat, wird etwas länger brauchen, aber trotzdem - es ist sehr einfach, das kann jeder.
Beim Löten verwende ich ein Flussmittel, was zugegebenermaßen die Arbeit manchmal erleichtert und die Qualität des Lötens damit viel einfacher sicherzustellen ist. Persönlich, auf Anraten von mir, nochmal DI HALT "und auf seinem Blog habe ich es bereits geschafft, mich in den LTI-120 zu verlieben. Ich habe ihn in einem so modischen Glas sofort mit einem Pinsel.

Wir ziehen vier Schrauben fest.

Das ist alles, der Umbau des Servos ist beendet. Nachdem Sie das Servo wieder bequemer und fester im Griff fixiert haben, können Sie mit dem Testen beginnen.

Dieses Mal werde ich nicht mit dem Controller umgehen, sondern einfach Spannung vom Netzteil auf 5 V an die grüne und rote Ader anlegen. Achtung, das Video zeigt ein ziemlich lautes Geräusch vom Betrieb des Laufwerks.
Wie Sie sehen können, hindert jetzt nichts unser Servo daran, sich zu drehen, ohne anzuhalten. Die Geräuschentwicklung des Laufwerks ist nicht wirklich leise, aber im Prinzip erträglich. Das ist wahrscheinlich alles für heute.
Servoantriebe haben normalerweise einen begrenzten Drehwinkel von 180 Grad. Betrachten Sie in diesem Fall ein "modifiziertes" Servo mit unbegrenztem Drehwinkel der Achse. 
TTX von der Verkäuferseite
Größe: 40 * 20 * 37,5 + 5 mm Antriebswelle
Gewicht: 38g
Kabellänge: 320 mm
Geschwindigkeit: 0,19 Sek./60 Grad (4,8 V)
0,22 Sek./60 Grad (6 V)
Die Geschwindigkeiten sind höchstwahrscheinlich vertauscht, bei 6 Volt sollte das Servo schneller sein
Drehmoment: 5kg. cm. bei (4,8 V)
5,5kg.cm.at (6V)
Spannung: 4,8 V-6 V
Lieferumfang Standard 
4 Schaukelstühle in verschiedenen Formen
4 Buchsen, 4 Gummidämpfer und 4 Schrauben zur Befestigung des Servos
und noch eine kleine Schraube zur Befestigung des Schaukelstuhls an der Welle lief vom Foto weg :)
Aussehen wirkt vertrauenerweckend, auch haptisch nichts, kleine Gußschwärme nur im Bereich der Aufsetzohren, ein Aufkleber ist leicht schief (ja, eine Tautologie!). Der Draht ist weich, der Stecker sitzt gut auf den Pins. 
So, jetzt die Eröffnung:
Wer wusste nicht, wie es funktioniert: In dem Gehäuse gibt es einen Motor, eine Steuerplatine und einen variablen Widerstand, durch dessen Position das Servo den Winkel der Achse bestimmt.
Das Getriebe in diesem Servo ist aus Kunststoff, die Ressource ist geringer als die eines Metallgetriebes und mag keine großen Lasten. Die Buchse für die Mittelachse besteht aus Kupfer oder aus einigen seiner Legierungen. Die Abtriebswelle hat ein Lager. Schmiermittel können hinzugefügt werden 
Elektrischer Teil 

Gehirne, die die Drehrichtung und -geschwindigkeit steuern, ein variabler Rezjuk und ein Elektromotor.
Und jetzt, Achtung, "Life Hack", wie man aus einem normalen Servo ein Servo mit konstanter Rotation macht 
Beim Original steckt die Variable mit ihrer Achse in die Abtriebswelle von innen im Servo, bei der modifizierten Welle wurde sie anscheinend beim Zusammenbau abgebissen/abgebrochen, der Widerstand ist auf Mittelstellung gesetzt damit der Welle dreht sich im Ruhezustand nicht. Wenn Sie weiter gehen, können Sie es komplett wegwerfen und durch 2 identische Konstantwiderstände ersetzen. Es ist praktisch, etwas SMD-Shnoe auf die Steuerplatine zu legen.
Gesamt:
serva als serva, nicht Raum, aber keine Konsumgüter,
gibt es günstiger und mit Metallgetriebe
PS
Wie in den Kommentaren richtig angemerkt, habe ich völlig vergessen zu erwähnen, wie das Servo gesteuert wird, das Servo wird mit 5-6 Volt und einem ppm-Signal über den dritten Draht versorgt.
Die gängigsten Steuerungsmöglichkeiten:
1) wir schließen auf der einen Seite die Power an, auf der anderen Seite den Ausgang für 3 „Verbraucher“ (Server, Motoren, etc.) Power und PPM Signal, mit dem Drehregler kann man Geschwindigkeit und Drehrichtung des Servos einstellen
2) RC-Geräte am Empfänger geben das gleiche ppm-Signal aus.
3) ein Arduino fahren
Video
ps
Durch die „Modifikation“ hat das Servo die Rückmeldung verloren, das Gehirn kennt die tatsächliche Position der Welle und die Drehrichtung nicht, bedenken Sie diesen Moment, wenn Sie es kaufen wollen.


















