自家製の対レーダースキーム。 自分の手でアクティブレーダー探知機を作成する方法(カメラやレーダーからの妨害)。 動的レーダーのサイズ変更
CS GOでレーダーを設定または最適化する方法がわかりませんでしたか? このトピックでは、CSグローバルオフェンシブのレーダー設定を見ていきます。レーダーを設定するには何が必要ですか? すべてが非常に簡単に実行され、ダウンロードに追加のソフトウェアは必要ありません。必要なのは次のとおりです。
コンソールをオンにする
コンソールを開く際に問題が発生した場合は、以下の手順に従ってください。
- CS:GOを起動します。
- 設定→ ゲームの設定;
- 開発者コンソールを有効にする→ はい;
- 設定→ キーボード/マウス;
- 一番下までスクロールすると、「コンソールを開く」がオンになっていることがわかります。 ` "-任意のキーを設定できます。
これでセットアップを開始できます!
レーダーのセットアップ
最初にアドバイスするのは、ボットを使ってゲームを作成し、ボットがあなたを殺したり、ゲーム内に直接レーダーを設定したりできないようにすることです。 はじめましょう:
レーダーの有効化/無効化
に オンにするレーダーの場合、コンソールでdrawradarコマンドを入力する必要があります。
そうするには 隠れるレーダーはコンソールコマンドhideradarを使用します;
cl_hud_radar_scale
このコマンドは、画面上のレーダーのサイズを制御します。
 |
|
| cl_hud_radar_scale "0.8" | cl_hud_radar_scale "1.3" |
| 最小: "0.8" //最大: "1.3" | |
cl_radar_always_centered
プレイヤーは常にレーダーの中心にいます。 一見、それほど違いはないように見えるかもしれませんが、プラスは明らかです。地図の隅にいるときは、レーダーの中央にいるときよりも、レーダー上の地形をよりよく見ることができます。レーダー。
 |
 |
| cl_radar_always_centered "0" | cl_radar_always_centered "1" |
| 0または1の2つの変数を選択できます | |
cl_radar_icon_scale_min
このコマンドは、レーダー上のさまざまなアイコンのサイズを変更します。
| cl_radar_icon_scale_min "0.4" | cl_radar_icon_scale_min "1.0" |
| 最小: "0.4" //最大: "1.0" | |
cl_radar_rotate
レーダー回転を有効または無効にします。 それらの。 無効にすると、レーダー上の地図は常に同じ位置になります。
 |
 |
| cl_radar_rotate "0" | cl_radar_rotate "1" |
| 0または1のいずれかに設定できます | |
cl_radar_scale
レーダーに表示される地図の縮尺を変更します。
 |
 |
| cl_radar_scale "0.25" | cl_radar_scale "1.0" |
| 最小: "0.25" //最大: "1.0" | |
cl_hud_bomb_under_radar
このコマンドは、爆弾アイコンを持っているときと持っていないときに、爆弾アイコンの表示のオンとオフを切り替えます。
動的レーダーのサイズ変更
レーダー上の地図の縮尺を大きくしたり、小さくしたりする必要がある場合があります。 これは、以下のバインドを使用して実行できます。
Bind "KP_plus" "incrementvar cl_radar_scale 0.25 1.0 0.05"; //レーダーバインド "KP_minus" "incrementvar cl_radar_scale 0.25 1.0-0.05";のサイズを大きくします。 //レーダーのサイズを縮小します
このバインドにより、ボタンが許可されます + また - 動的に レーダーのサイズを変更するを押すと。 ボタンは任意に選択できます。
標準レーダー設定
cl_hud_radar_scale "1"; cl_radar_always_centered "1"; cl_radar_icon_scale_min "0.6"; cl_radar_rotate "1"; cl_radar_scale "0.7"; cl_hud_bomb_under_radar "1";マイクロコントローラーを操作するスキルを持っているため、レーダーは、マイクロ回路、ワイヤーのセット、赤外線センサー、およびその他のデバイスを使用して独立して作成できます。 さらに組み立てるための図も必要です。
必要になるだろう
- -無線工学およびマイクロコントローラーを操作するスキル。
命令
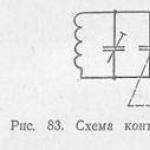
反レーダーのスキーム
おそらく、すべてのドライバーは少なくとも一度は取得するという考えを持っていました反レーダー、特に道路上の別の交通警察のラケットの後。 だからビジネスに! しかし、今はっきりさせておきましょう:アンチレーダーは抑制装置です警察のレーダー、そしてそれを組み立てることは非常に難しい作業です。 ここでは、より単純な対レーダースキーム、いわゆるレーダー-検査官による車のスキャンを知らせる検出器。
車の速度を測定するために、交通警察のレーダーは車から反射された放射を受信し、レーダー探知機は直接放射を受信するため、レーダー探知機は常に車の速度を測定するよりも早い時間にレーダーを検出できます! したがって、交通警官が車から500 m離れたレーダーからスキャンする場合、これはVizirデバイスの範囲であり、車が100 mの可視距離に近づく前に、速度を落とす機会があります。
この対レーダー回路 ネット上ではかなり一般的で、個人的には収集しませんでしたが、そのような自家製のデバイスを修理しなければなりませんでした。 そこでは、マイクロ波ダイオード検出器がスズ製の小さな漏斗の中に立っていて、構造全体がタバコのパックのサイズのホイルテキソライトからはんだ付けされたケースに収まりました。 マイクロ波照射により、点滅してピークに達した。 これが雑誌のレーダー探知機回路の別のバージョンです無線:

交通警察で使用されているすべてのレーダーは、10525 MHz、24150 MHz、および34700MHzの周波数で動作します。 これらのレーダー探知機はそれらすべてを検出できます。
カスタマイズ レーダー探知機回路レーダーを持っている人の近くに立っているときに実行できます。

または、静止レーダーの近くで光らないように-カメラ:

時々彼らは交通警察のポストの数キロ前に置かれます:

最近、次の機関が採用されました。VIZIRレーダービデオ録画速度計は、速度計とデジタル写真およびビデオカメラの2つの独立したユニットで構成されています。 カメラは、運転中の車が事前に設定された制限速度を超えたときに自動的にオンになり、交通検査官によって手動でオンになります。 レーダー内蔵の防犯カメラ。 デバイスは常に動作し、速度を超えるとセンサーがカメラをアクティブにします。
Alexei Navalny Anti-Corruption Foundationは、飛行機がビジネス会議へのフライトだけでなく、犬をさまざまな国際展示会や競技会に連れて行くためにも役人によって使用されていることを発見しました。 しかし、彼らの手段を超えて生きている人々の使用人を特定するためにそれの前に開かれた見通しについての市民社会の喜びは短命でした-上記のサービスは副首相と彼の犬の飛行を監視する能力をオフにしました、そして彼らはそのような決定の合法性についてのすべての質問を無視しました。
何をすべきか?
商業飛行追跡サービスが州の側で行動し、公務員が所有する航空機に関する情報の公開を拒否した場合、私たち市民はこのデータを自分で入手できます。 機器に約4000ルーブルを費やし、組み立てと設置に2日間の自由時間を費やしたので、誰でもADSBexchange.comの独立した航空機追跡プロジェクトに参加できます。
使い方?
現代の各航空機には、いわゆるADS-Bトランスポンダー(レーダーステーション(RLS)からの要求に応じて特定の周波数で自身に関する情報を送信するデバイス)が装備されています。これは、固有の航空機IDと、位置に関するデータです。 、飛行速度および他のいくつか。 ここで重要なのは、無料で入手できる安価な家庭用機器(デコーダープログラムが実行されているRaspberry Piシングルボードコンピューターに接続されたUSBDVB-Tデジタルテレビ受信機)を使用して、誰でもこの情報を受信およびデコードできることです。
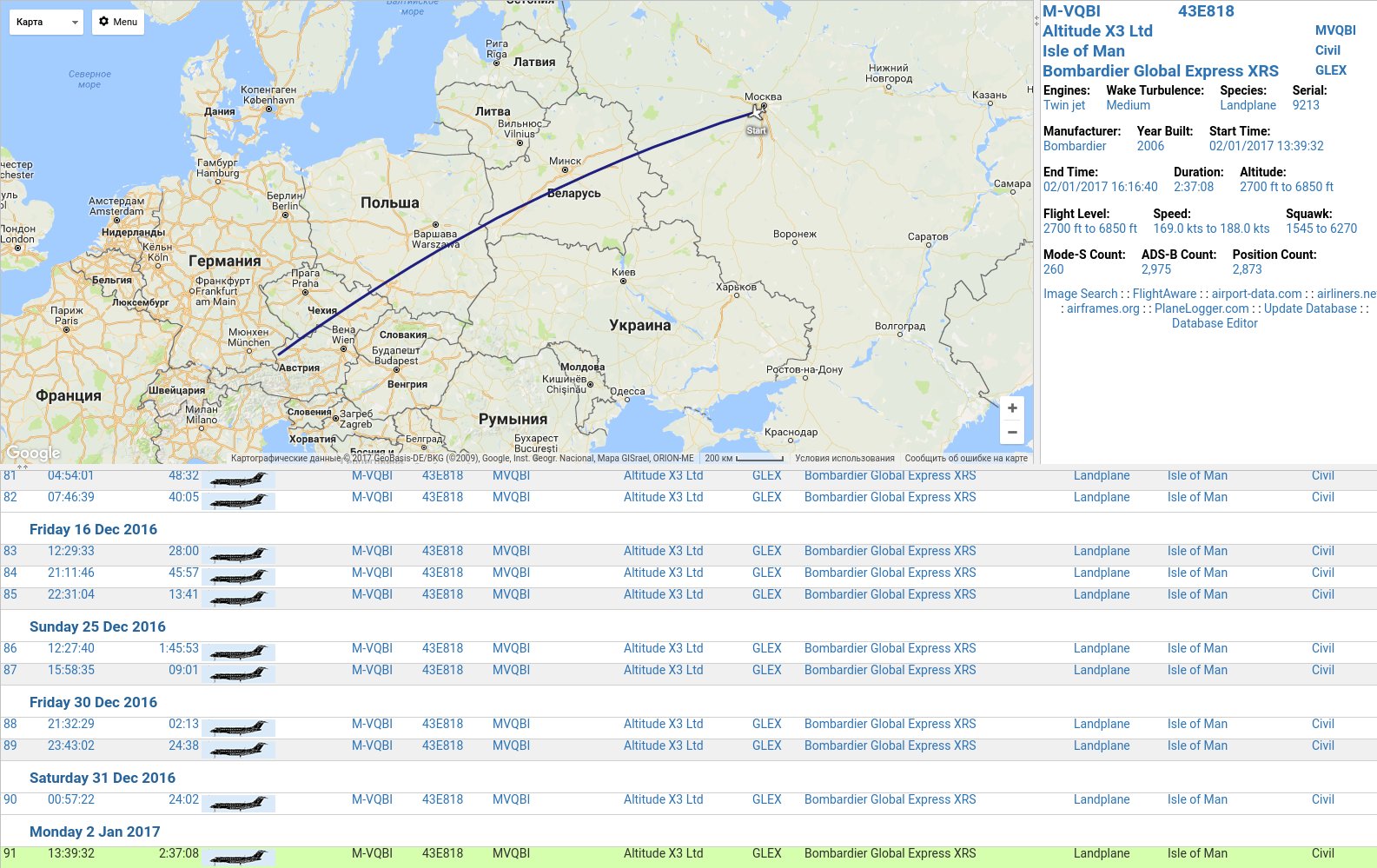
受信機の視線内にある航空機に関するデコードされた情報はローカルで表示できますが、出発地から目的地までの航空機の完全なルートを追跡するには、すべての中間地点から受信機から受信した情報を組み合わせる必要があります。 これはまさにADSBexchange.comサービスの目的であり、ローカルの受信ステーションから受信したデータに基づいて、PlaneFinder.netやFlightRadar24.comなどのサービスと機能的に類似したグローバルフライトマップ(グローバルレーダービュー)を作成します。 、それらとは異なり、追跡された航空機に関するエンドユーザーからの情報を隠しません。 ここでは、たとえば、年末年始に、副首相が再びオーストリアのダーチャに飛んだことがわかります。
サービスに接続されている受信局が多いほど、カバレッジはより完全になります。ロシアの場合、状況は依然として非常に悲しいです。地図を見て、私たちが持っている局の数をヨーロッパの局の数と比較してください。

しかし、私たちには状況を変える力があります! これを行うには、独自の受信ステーションを構築し、それをADSBexchangeネットワークに含める必要があります。
これには何が必要ですか?
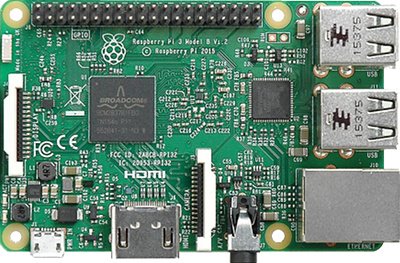
1ラズベリーパイ
世界で最も人気のあるシングルボードマイクロコンピュータであり、メモリサイズ、プロセッサ周波数、および周辺機器のセットが異なるいくつかのモデルがあります。 私たちの目的では、イーサネットポートが搭載されているモデルであれば、たとえばRaspberry Pi3モデルBを使用できます。
たとえば、Aliexpressで電源とケースを一緒に約3000ルーブルの価格で購入できます。 国内の売り手で検索することもできますが、もちろん価格はかなり高くなります。
2.メモリーカード
Raspberry Pi 3にはmicroSDメモリカードが必要です。古いモデルではフルサイズのSDカードが使用されます。 推奨ボリュームは8GB、速度クラスは10です。信頼できるメーカーの中で、SanDiskまたはTranscendカードをお勧めします。 発行価格は約300ルーブルです。
3. USBDVB-Tレシーバー

Agilentで検索するキーワードは「RTL2832UR820T2」で、価格はこのように約500ルーブルです。 地元の販売者で検索することはできますが、外観がまったく同じであるレシーバーが他のチップ上に構築されていることが判明する可能性があるため、内部にあるのはRTL2832U + R820T2バンドルであることを販売者に確認する必要があります。
4.アンテナ
USB受信機にはアンテナが付属していますが、控えめに言っても、航空機のトランスポンダからの信号の受信には適していないため、受信半径は小さく、最大で数十キロメートルになります。 半径数百キロメートルを取得するには、より適切な半径に交換する必要があります。 最も簡単なオプションは、標準のアンテナピンを3エレメントのコリニアアンテナに交換することです。これは、次の図(クリック可能)に従って銅線または鋼線から曲げることができます。

次のようなものを取得する必要があります。

最大400kmの受信範囲を提供する最良のオプションは、同軸コリニアアンテナを使用することです。
航空機のトランスポンダからの無線信号の受信は見通し内でのみ可能であるため、アンテナは屋外、理想的には屋根の上に配置する必要があります。 これを行うには、最大5メートルの長さのUSB延長ケーブルを使用して、レシーバーのみを密閉ボックスに配置するか、PoE(この場合、Raspberry Piもボックスに配置する必要があります)を使用できます。
5.ソフト
ADSBexchangeは現在、変更されたPiAwareディストリビューションを使用しています。 このディストリビューションはFlightAwareによって開発されました。FlightAwareは民間航空機の追跡サービスも提供していますが、残念ながら、元の形式ではプライベートジェットに関する情報も隠されています。 このディストリビューションは、インストールと構成が非常に簡単であるため、ADSBexchangeの基礎として使用されます。
Windowsのステップバイステップの説明:
- 配布パッケージhttps://www.adsbexchange.com/downloads/ADSBexchange-img-1.2.zip(868 MB)をダウンロードして、コンピューターに保存します。
- ADSBexchange-img-1.2.zipファイルを解凍します。
- Win32DiskImagerユーティリティをダウンロードして、管理者として実行します(これを行うには、ファイルを右クリックして[管理者として実行]を選択します)。
- ADSBexchange-img-1.2.imgファイルを選択します。
- SDカードをコンピューターのカードリーダーに挿入します。
- 対応するリストからSDカードの文字指定を選択します。
- 「録音」をクリックして、数分間終了を待ちます。
- 終了したら、カードリーダーからメモリカードを取り外し、RaspberryPiに挿入します。
- すべてのケーブル(USB電源、イーサネットケーブル、USBレシーバー)をRaspberryPiに接続します。 同時に、Raspberry Piで赤色のLEDが点灯し、緑色のLEDが点滅し、イーサネットネットワークコネクタの近くで緑色と黄色になります。
- RaspberryPiが起動するまで数分待ちます。
- FlightAwareWebサイトで新しいアカウントを登録します。
- 受信者を作成したアカウントにリンクします。
- 受信機の設定([マイADS-B]タブ)で、受信機の位置座標と地上からのアンテナ設置高さを編集します。
- しばらくすると、受信機がカバレッジマップhttps://www.adsbexchange.com/active-feeds/に表示されます。
- 受信ステーションによって現在追跡されている航空機は、FlightAware Webサイトの[MyADS-B]タブの[Webインターフェイス:ライブデータの表示]リンクをクリックして表示できます。
利益!
これで、受信機は2つのフライト追跡ネットワーク(ADSBexchangeとボーナスとしてFlightAware)に同時に参加します。 この指示を配布し、他の人が自分の受信ステーションを構築するのを手伝ってください。そうすれば、シュバロフの犬の飛行機は市民社会のすべてを見通す目から隠れることができなくなります!
実践によれば、自家製のものはすべて、高品質で行われた場合、すべてのシリアルの中で最もよく機能することがよくあります。 これは、大量組み立てとは異なり、手動組み立てが最も慎重に行われるためです。 また、自分の手で、まったく販売されていないものを集めることができます。 これらのタスクの1つは、レーダーの作成方法のタスクです。 レーダー探知機とレーダー探知機が販売されていますが、交通警察が使用するようなレーダー自体を購入することはほとんど不可能です。 この特別な技術は市販されていないため、価格に関係なく事実上利用できません。 それが販売されていたとしても、それはその買収の主な障害となる交通警察によって車の速度を制御するように設計された現代の電子システムの価格でした。
日曜大工の電子機器の数にレーダーを含める方法を考えるときは、まず、このかなり複雑な機器を組み立てるためのコンポーネントをどこで入手できるかを理解する必要があります。 コンポーネントには、優れたデジタルビデオカメラと、移動物体の速度をレーザー測定するためのデバイスが含まれます。これらは、エアロモデリング愛好家のために専門店で購入できます。 さらに、レーザー速度計の読み取り値と画像をビデオカメラからコンピューターに転送し、移動中の車の画像と一緒にこれらの読み取り値を記録できるパッチコードが必要になります。 また、カメラとレーザー速度計の両方が同じ物体を「見る」ことができるように、2つの別々の名前の付いた電子機器で構成されるレーダーを設置する方法の問題を解決するハウジングも必要になります。
レーザースピードメーターは、デバイスによってパルスされたレーザービームが移動物体の表面で反射してデバイスに戻るまでの時間を固定するという原理で動作します。 速度測定時のこのような固定は最大10回実行され、その後、デバイスは、照準を合わせた物体の速度を測定した結果をディスプレイに表示します。 実際、これはレーダーであり、カメラは結果を確実に記録するためにのみ必要です。 レーダーをコンピューターに接続する方法の問題を解決することは残っています。 この機器には情報をコンピュータに転送するための標準設定があるため、これにはUSBケーブルが必要です。 同様に、カムコーダーは2本目のケーブルを使用して別のUSBポートを介してコンピューターに接続されます。
カメラとデバイスは、それらをしっかりと固定し、両方のデバイスが同じ移動物体を「見る」ことができるようにするハウジングに一緒に配置されます。 すべてのデバイスが同時にオンになると、オンラインモードでカメラから受信した画像は開いた下部のウィンドウに残り、レーザー速度計から受信した画像は、小さいサイズの別のウィンドウでその上に重ねられます。 Camtasia Studioプログラムがコンピューターにインストールされているため、モニターで発生するすべてのことを記録できます。このプログラムは、付属の指示に従って構成され、記録モードで起動します。 その結果、レーダーの使い方が明確になります。すべてを同時にオンにし、カメラとメーターで身体を動く物体に向け、動く物体の画像とコンピューターモニターからの速度の読み取り値を組み合わせて記録します。